







专利摘要
本实用新型提供了一种基于外骨骼数据手套和遥操纵杆的遥操作系统,包括外骨骼手数据手套、遥操纵杆、远端机器臂和处理控制单元。所述外骨骼手数据手套和遥操作杆分别用于用户手指关节角度和手部位置的跟踪,同时用于实现手指部位和整条手臂上可感知的力反馈,所述处理控制单元包括传感器电路和上位机系统,上位机对采集到的用户动作信息进行分析处理,并将控制信号发送给远端机器臂控制器,完成相应的操作;此外,位于机械手上的力传感器可将机械手末端压力实时传送给上位机系统,再通过外骨骼数据手套和遥操纵杆反馈给佩戴者,以实现更全面、更真实的力反馈。本实用新型可应用于航空、工业、医疗、教学和娱乐等领域。
权利要求
1.一种基于外骨骼数据手套和遥操纵杆的遥操作系统,其特征在于,所述遥操作系统由外骨骼手数据手套(a1-1)、遥操作杆(a1-2)、远端机器臂单元(a2)和处理控制单元(a3)组成。
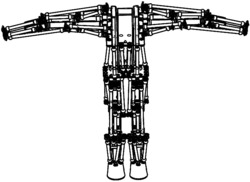
2.根据权利要求1所述的基于外骨骼数据手套和遥操纵杆的遥操作系统,其特征在于,所述外骨骼数据手套包括手腕固定基架(b7)、手背固定基架(b6)、5个仿人手指、位置传感器和外骨骼数据手套微控制器(b11),其中所述5个仿人手指包括拇指(b1)、食指(b2)、中指(b3)、无名指(b4)、小指(b5)。
3.根据权利要求2所述的基于外骨骼数据手套和遥操纵杆的遥操作系统,其特征在于,所述外骨骼数据手套的手背固定基架(b6)一端通过四指球形铰链(c7)与除拇指外的4个仿人手指的指根段相连接,另一端通过4根长度可调节的链条(b10)与手腕固定基架(b7)相连,所述手腕固定基架(b7)架通过拇指球形铰链(d7)与拇指指根段(d3)相连接;所述手背固定基架(b6)和手腕固定基架(b7)均由弹性材料制成的手背固定基架绷带(b8)、手腕固定基架绷带(b9)分别固定于佩戴者的手掌与手腕部位。
4.根据权利要求2所述的基于外骨骼数据手套和遥操纵杆的遥操作系统,其特征在于,所述外骨骼数据手套的除拇指外的4个仿人手指均包括三段:四指指尖段(c1)、四指指中段(c2)和四指指根段(c3);四指指尖段(c1)通过四指销钉铰链(c4)与四指指中段(c2)相连接,四指指中段(c2)由两部分构成,该两部分由四指调节丝杠(c5)和四指调节螺母(c6)连接,实现外骨骼手套的手指部分长度可调节,四指指中段(c2)通过销钉铰链结构与四指指根段(c3)相连接,四指指根段(c3)另一端通过四指球形铰链(c7)与所述手背固定基架(b6)相连接;所述外骨骼数据手套的拇指也包括三段:拇指指尖段(d1)、拇指指中段(d2)和拇指指根段(d3),与四指不同的是拇指指根段(d3)为曲柄连杆,所述曲柄连杆末端通过拇指球形铰链(d7)与手腕固定基架(b7)相连接。
5.根据权利要求2所述的基于外骨骼数据手套和遥操纵杆的遥操作系统,其特征在于,所述外骨骼数据手套的5个仿人手指每段关节的四指销钉铰链(c4)、拇指销钉铰链(d4)的上方均安有定滑轮:四指指尖关节定滑轮(c9)、四指指中关节定滑轮(c14)、拇指指尖关节定滑轮(d9)和拇指指中关节定滑轮(d14),固定于四指指尖段(c1)的四指驱动绳(c10)分别经过四指指尖关节定滑轮(c9)和四指指中关节定滑轮(c14),固定于拇指指尖段(d1)的拇指驱动绳(d10),分别经过拇指指尖关节定滑轮(d9)和拇指指中关节定滑轮(d14),四指驱动绳(c10)和拇指驱动绳(d10)与相应的基架驱动电机(b12)相连接,外骨骼数据手套微控制器(b11)通过控制每个基架驱动电机(b12)的旋转实现驱动绳的放松与收紧,从而实现部分力反馈功能。
6.根据权利要求2所述的基于外骨骼数据手套和遥操纵杆的遥操作系统,其特征在于,所述外骨骼数据手套的5个仿人手指指尖段均为包裹型结构,其内部底端安有一个弹性压片(e1),压片通过丝杠(e2)与指尖驱动电机(e3)相连,从而通过指尖驱动电机(e3)的正反转调节压片的压紧程度,给用户以较为真实的触觉反馈。
7.根据权利要求2所述的基于外骨骼数据手套和遥操纵杆的遥操作系统,其特征在于,所述位置传感器包括两种,一种为指根位置传感器(f2),位于指根部位球形铰链连接处,球形铰链基座(f1)和传感器挡板(f3)固定于手背固定基架(b6)或手腕固定基架(b7)上,指根位置传感器(f2)安装于传感器挡板(f3)上,可以满足指根部位弯曲/伸展、外展/内收2个自由度的测量要求;另一种为指尖和指中关节位置传感器,包括:四指指尖关节位置传感器(c8)拇指指尖关节位置传感器(d8)、四指指中关节位置传感器(c15)和拇指指中关节位置传感器(d15),位于销钉铰链连接的关节处,满足关节1个自由度的测量要求。
8.根据权利要求2所述的基于外骨骼数据手套和遥操纵杆的遥操作系统,其特征在于,所述外骨骼数据手套的手腕固定基架(b7)上设有遥操纵杆手柄夹持单元,包括支撑板(g2)、调节螺钉(g1)和夹持垫片(g3),用以固定遥操纵杆的操作手柄,方便所述外骨骼数据手套和遥操纵杆的配合使用。
说明书
技术领域
本发明涉及机器人遥操作技术领域。具体地涉及一种基于外骨骼数据手套和遥操纵杆的遥操作系统与方法的相关技术。
背景技术
随着空间、海洋技术的迅速发展,处于交互控制方式下的主、从式遥操作机器人技术成为研究热点,例如在危险环境下工作的智能机器人,日常生活中的远程医疗、远程教学、虚拟现实娱乐设施等。在遥操作技术中,力觉临场感可以使操作者带有力感觉地操纵遥控机器人完成各种复杂的、精细的作业,力反馈技术使得操作者在遥操作过程中可以做出正确决策、有效地控制机器人完成复杂任务。
中国实用新型专利公开号:CN 207096930 U,名称:一种触觉反馈外骨骼用控制系统。该实用新型提供了一种外骨骼主手触觉反馈控制系统,系统能获取跟踪手指动作信息,并能通过对手指的压感实现较为真实的触觉反馈。然而外骨骼主手只限于获取手指各关节的运动信息,无法完成对手部的平移、旋转等动作的跟踪,限制了其在遥操作中的应用范围。此外,现实中人手在完成某项任务时,例如推箱子,不仅手指部位会有受力感,操作者的整条手臂都会存在受力感。而该实用新型在触觉反馈上只是基于手指指尖的,力反馈的全面性和真实性还有待改善。
发明内容
为了获取更多主手动作信息、提高力反馈的全面性和真实性,本发明提供了一种基于外骨骼手数据手套和遥操纵杆的遥操作系统与方法,可应用于航空、工业、医疗、教学和娱乐等领域。
该系统由外骨骼手数据手套、遥操纵杆、远端机器臂单元和处理控制单元组成。所述外骨骼数据手套包括手腕固定基架、手背固定基架、5个仿人手指、位置传感器和外骨骼手套微控制器。
所述手背固定基架一端通过球形铰链与除拇指外的4个仿人手指的指根部相连接,另一端通过4根长度可调节的链条与手腕固定基架相连,所述手腕固定基架通过球形铰链与拇指根部相连接。
所述手背和手腕固定基架均由弹性材料制成的绷带分别固定于佩戴者的手掌与手腕部位,实现固定功能。
所述外骨骼数据手套的除拇指外4个仿人手指均包括三段:指尖段、指中段和指根段。指尖段通过销钉铰链与指中段相连接,指中段由两部分构成,该两部分由丝杠螺母连接,实现外骨骼手套的手指部分长度可调节,指中段通过销钉铰链与指根段相连接,指根段另一端通过球形铰链与所述手背固定基架相连接。
所述外骨骼数据手套的拇指也包括三段:指尖段、指中段和指根段,与四指不同的是其指根段为曲柄连杆,用以满足拇指结构的特殊性,所述曲柄连杆末端通过球形铰链与手腕固定基架相连接。
所述5个仿人手指每段关节的销钉铰链连接处的上方均安有定滑轮,固定于指尖处的驱动绳,分别经过指中段和指根段的两个定滑轮,与安装在手背固定基架上的驱动电机相连接,外骨骼数据手套微控制器通过控制驱动电机的旋转实现驱动绳的放松与收紧,从而实现部分力反馈功能。
此外,所述5个仿人手指指尖段均为包裹型结构,其内部底端安有一个弹性压片,压片通过丝杠与驱动电机相连,从而通过驱动电机的正反转调节压片的压紧程度,给用户以较为真实的触觉反馈。
所述位置传感器包括两种,一种位于指根部位球形铰链连接处,可以满足指根部位2个自由度(弯曲/伸展、外展/内收)的测量要求。另一种位于销钉铰链连接的关节处,满足关节1个自由度的测量要求。各关节处的位置传感器不限于某种特定型号的传感器,满足待测自由度数量要求即可。
所述外骨骼手套微控制器固定于所述手腕固定基架上,实现对位置传感器数据的采集和驱动电机的控制。
所述手腕固定基架上设有遥操纵杆手柄夹持单元,包括支撑板、调节螺钉和夹持垫片,用来固定遥操纵杆的操作手柄,方便所述外骨骼数据手套和遥操作杆的配合使用。
所述遥操纵杆可以实现操作者手部整体空间动作的跟踪,同时可对操作者进行整条手臂上可感知的力反馈。
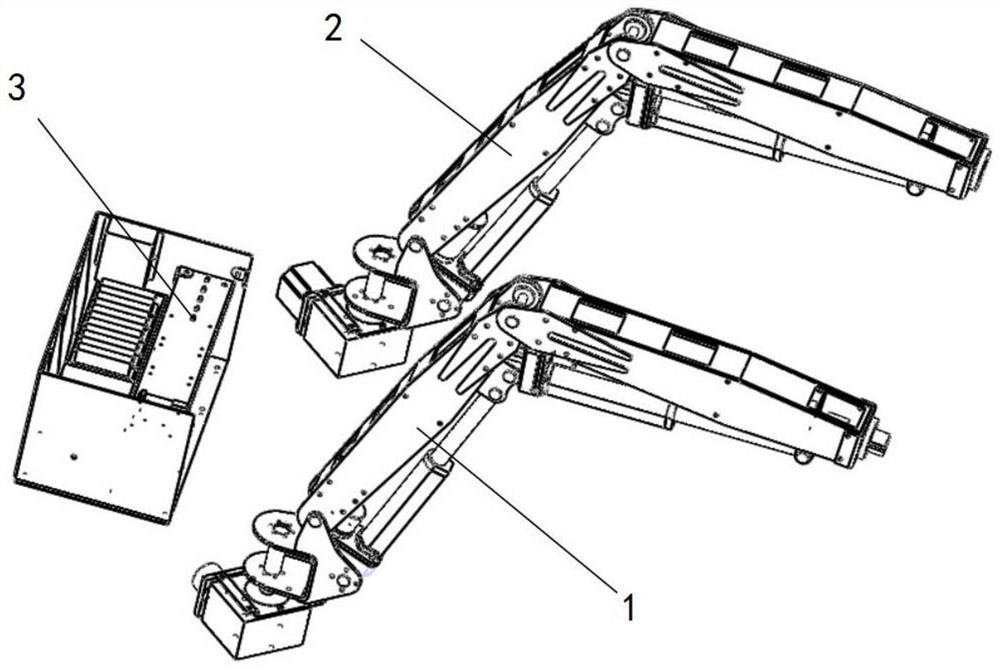
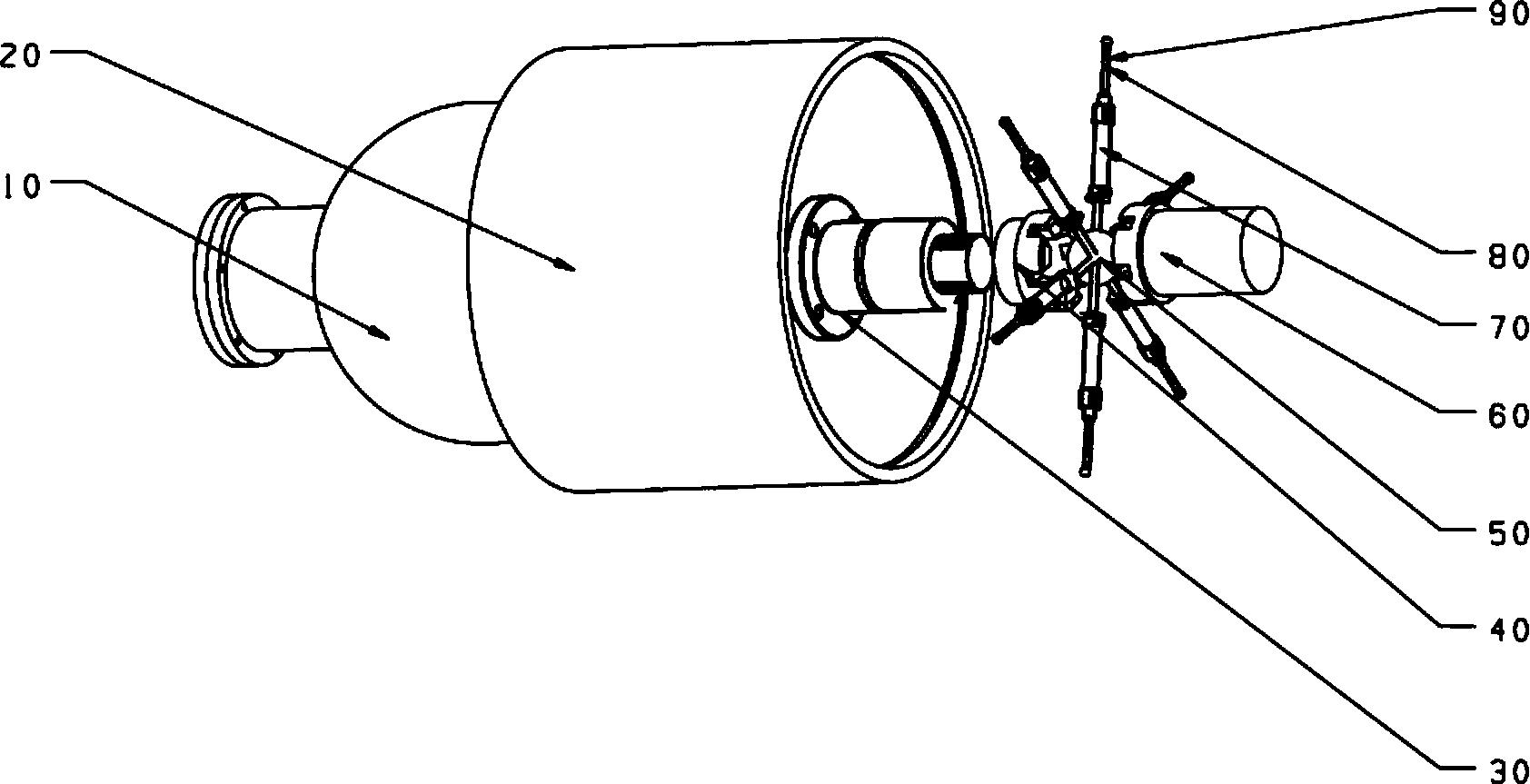
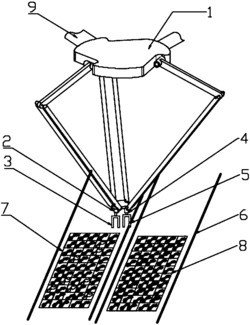
所述远端机器臂单元,可为独立机器臂,也可为机器人的某条手臂,其末端安有仿人机械手(与近端外骨骼数据手套相匹配),机械手上附有力传感器,用于实时采集抓取过程中的压力信息。
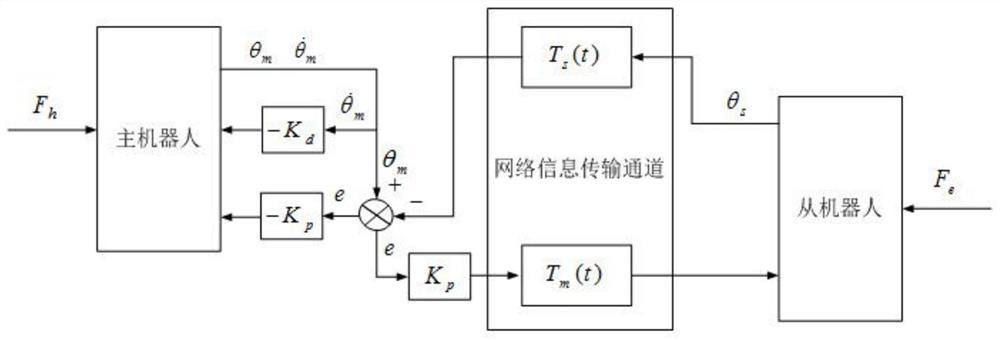
所述处理控制单元主要包括传感器电路和上位机。所述传感器电路用于:(1)采集操作者的实时动作信息数据,并将其传输给上位机;(2)采集远端机器臂末端实时力数据,并传输给上位机。上位机处理过程包括:(1)对采集到的操作者实时动作信息数据进行处理,得出角度控制信号,并将其传输给远端机器人控制器;(2)对反馈回的机器臂末端的力进行处理,并发出控制信号给遥操纵杆和外骨骼数据手套微控制器,对各部位驱动电机进行控制,将作用力通过外骨骼数据手套和遥操纵杆反馈给佩戴者。
本发明的优点在于:(1)外骨骼数据手套设有遥操纵杆手柄夹持单元,可以协同遥操纵杆实现操作者手指动作及手部位置信息的跟踪;(2)操作过程中,外骨骼手套通过五指驱动绳和指尖包裹结构提供的反馈作用力可实现手指部位的力反馈,同时遥操纵杆可完成用户整条手臂上可感知的力反馈,从而实现更全面、更真实的力反馈。
附图说明
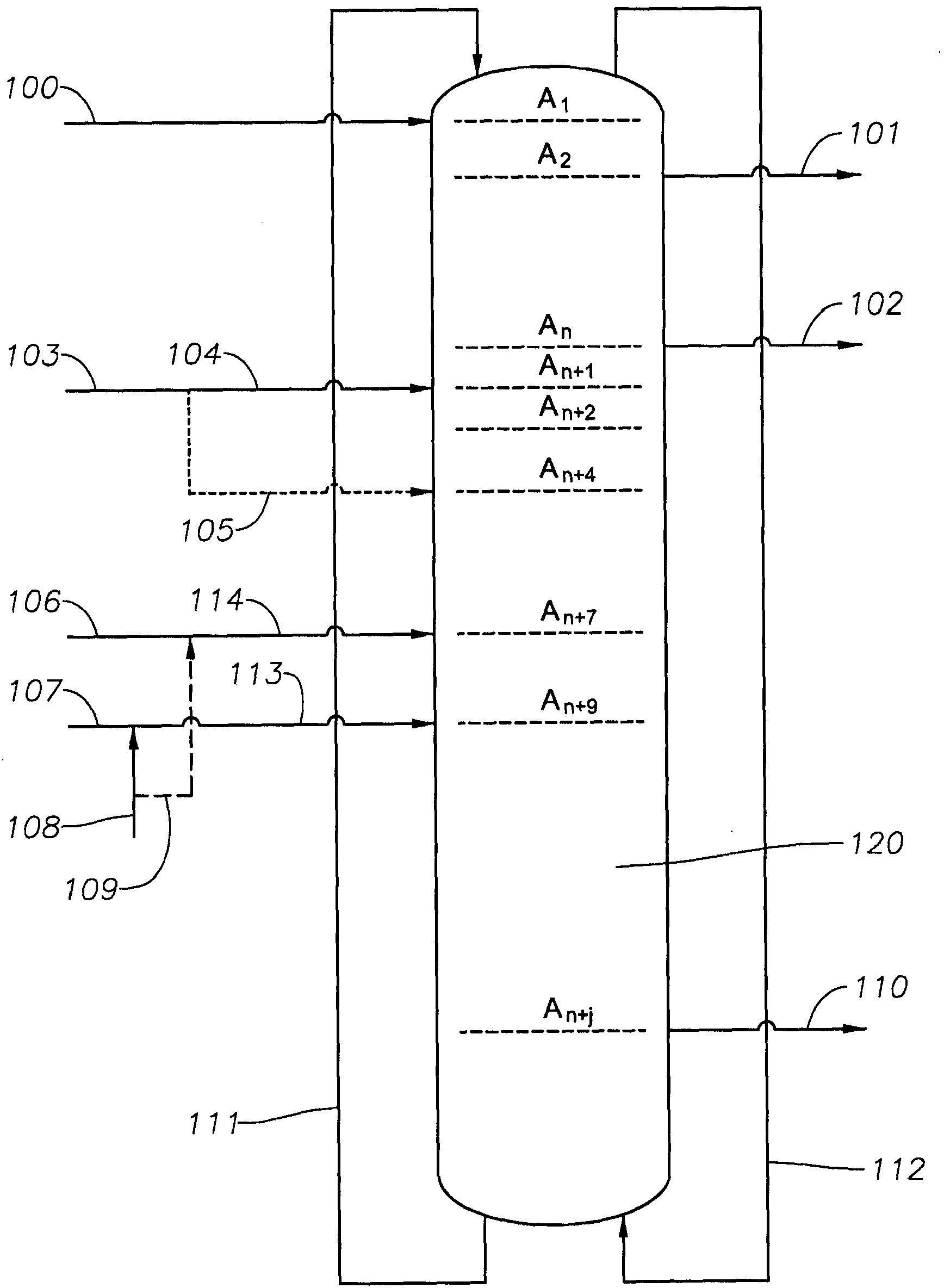
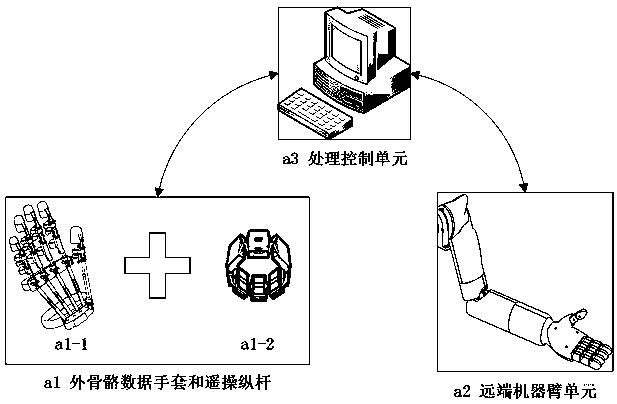
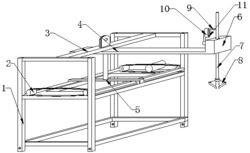
图1为本发明一种基于外骨骼数据手套和遥操纵杆的遥操作系统的结构示意图,图中,a1近端设备包括a1-1外骨骼数据手套和a1-2遥操纵杆,a2远端机器臂单元,a3处理控制单元;
图2为外骨骼数据手套结构示意图,图中,b1至b5分别为外骨骼数据手套的拇指、食指、中指、无名指和小指,b6手背固定基架,b7手腕固定基架,b8手背固定基架弹性绷带,b9手腕固定基架弹性绷带,b10基架连接条,b11外骨骼是故居手套微控制器,b12绳驱动电机,b13遥操纵杆手柄夹持单元;
图3为外骨骼数据手套四指结构示意图,图中,c1至c3分别为四指指尖段、四指指中段和四指指根段,c4四指销钉铰链,c5四指调节丝杠,c6调节螺母,c7四指球形铰链,c8四指指尖关节位置传感器,c9四指指尖关节定滑轮,c10四指驱动绳,c11四指指尖驱动电机,c12四指指尖弹性压片,c13四指弹性绷带,c14四指指中关节定滑轮, c15四指指中关节位置传感器;
图4为外骨骼数据手套拇指结构示意图,图中,d1至d3分别为拇指指尖段、拇指指中段和拇指指根段,d4拇指销钉铰链,d5拇指调节丝杠,d6调节螺母,d7拇指球形铰链,d8拇指指尖关节位置传感器,d9拇指指尖关节定滑轮,d10拇指驱动绳,d11拇指指尖驱动电机,d12拇指指尖弹性压片,d13拇指弹性绷带,d14拇指指中关节定滑轮, d15拇指指中关节位置传感器;
图5为外骨骼数据手套五指的指尖结构示意图,图中,e1弹性压片,e2调节丝杠,e3指尖驱动电机;
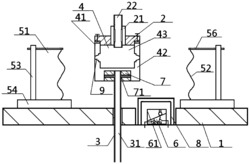
图6为外骨骼数据手套五指指根关节部位结构示意图,图中,f1球形铰链基座,f2指根位置传感器,f3传感器挡板;
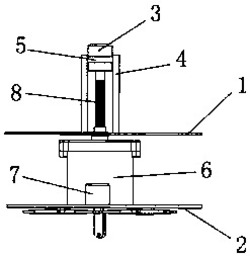
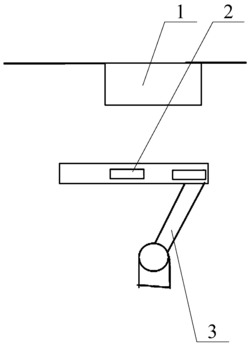
图7为外骨骼数据手套的遥操纵杆手柄夹持单元结构示意图,图中,g1调节螺钉,g2支撑板,g3夹持垫片,g4遥操纵杆手柄;
图8为系统的功能总图。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地较为详细描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
参照图1和图2,本实施例公开了一种基于外骨骼数据手套和遥操纵杆的遥操作系统,包括外骨骼手数据手套a1-1、遥操作杆a1-2、远端机器臂单元a2和处理控制单元a3。
如图2所示,所述外骨骼数据手套包括手腕固定基架b7、手背固定基架b6、5个仿人手指(拇指b1、食指b2、中指b3、无名指b4、小指b5)、位置传感器和外骨骼数据手套微控制器b11。
所述外骨骼数据手套的手背固定基架b6一端通过四指球形铰链c7与除拇指外的4个仿人手指的指根段相连接,另一端通过4根长度可调节的链条b10与手腕固定基架b7相连,所述手腕固定基b7架通过拇指球形铰链d7与拇指指根段d3相连接。
所述手背b6和手腕固定基架b7均由弹性材料制成的手背固定基架绷带b8和手腕固定基架绷带b9分别固定于佩戴者的手掌与手腕部位,实现固定功能。
如图3所示,所述外骨骼数据手套的除拇指外4个仿人手指均包括三段:四指指尖段c1、四指指中段c2和四指指根段c3;四指指尖段c1通过四指销钉铰链c4与四指指中段c2相连接,四指指中段c2由两部分构成,该两部分由四指调节丝杠c5和四指调节螺母c6连接,实现外骨骼手套的手指部分长度可调节,四指指中段c2通过销钉铰链结构与四指指根段c3相连接,四指指根段c3另一端通过四指球形铰链c7与所述手背固定基架b6相连接;所述外骨骼数据手套的拇指也包括三段:拇指指尖段d1、拇指指中段d2和拇指指根段d3,与四指不同的是拇指指根段d3为曲柄连杆,所述曲柄连杆末端通过拇指球形铰链d7与手腕固定基架b7相连接。
如图4所示,所述外骨骼数据手套的拇指也包括三段:拇指指尖段d1、拇指指中段d2和拇指指根段d3,与四指不同的是其指根段为曲柄连杆,用以满足拇指结构的特殊性,所述曲柄连杆末端通过拇指球形铰链d7与手腕固定基架b7相连接。
如图3和图4所示,所述外骨骼数据手套的5个仿人手指每段关节的四指销钉铰链c4、拇指销钉铰链d4的上方均安有定滑轮:四指指尖关节定滑轮c9、四指指中关节定滑轮c14、拇指指尖关节定滑轮d9和拇指指中关节定滑轮d14,固定于四指指尖段c1的四指驱动绳c10分别经过四指指尖关节定滑轮c9和四指指中关节定滑轮c14,固定于拇指指尖段d1的拇指驱动绳d10,分别经过拇指指尖关节定滑轮d9和拇指指中关节定滑轮d14,四指驱动绳c10和拇指驱动绳d10与相应的基架驱动电机b12相连接,外骨骼数据手套微控制器b11通过控制每个基架驱动电机b12的旋转实现驱动绳的放松与收紧,从而实现部分力反馈功能。
此外,如附图5所示,所述5个仿人手指指尖段均为包裹型结构,其内部底端安有一个弹性压片e1,压片通过丝杠e2与指尖驱动电机e3相连,从而通过指尖驱动电机e3的正反转调节压片的压紧程度,给用户以较为真实的触觉反馈。
所述位置传感器包括两种,一种为指根位置传感器f2,位于指根部位球形铰链连接处,如图6所示,球形铰链基座f1和传感器挡板f3固定于手背固定基架b6或手腕固定基架b7上,指根位置传感器f2安装于传感器挡板f3上,可以满足指根部位弯曲/伸展、外展/内收2个自由度的测量要求;另一种为指尖和指中关节位置传感器,包括:四指指尖关节位置传感器c8拇指指尖关节位置传感器d8、四指指中关节位置传感器c15和拇指指中关节位置传感器d15,位于销钉铰链连接的关节处,满足关节1个自由度的测量要求。
所述外骨骼手套微控制器b11固定于所述手腕固定基架上,实现对位置传感器数据的采集和驱动电机的控制。
如图7所示,所述手腕固定基架上设有遥操纵杆手柄夹持单元,包括支撑板g2、调节螺钉g1和夹持垫片g3,用来固定遥操纵杆的操作手柄,方便所述外骨骼数据手套和遥操纵杆的配合使用。
所述遥操纵杆a1-2可以实现操作者手部整体空间动作的跟踪,同时可对操作者进行整条手臂上可感知的力反馈。
所述远端机器臂单元a2,可为独立机器臂,也可为机器人的某条操作臂,其末端安有仿人机械手(与近端外骨骼数据手套相匹配),机械手上附有力传感器,用于实时采集抓取过程中的压力信息。
所述处理控制单元a3主要包括传感器电路和上位机。所述传感器电路用于:(1)采集操作者的实时动作信息数据,并将其传输给上位机;(2)采集远端机器臂a2末端实时力数据,并传输给上位机。上位机处理过程包括:(1)对采集到的操作者实时动作信息数据进行处理,得出角度控制信号,并将其传输给远端机器人控制器;(2)对反馈回的机器臂末端的力进行处理,并发出控制信号给遥操纵杆和外骨骼数据手套微控制器,对各部位驱动电机进行控制,将作用力通过外骨骼数据手套和遥操纵杆反馈给佩戴者。
进一步地,该遥操作系统功能总图如图7所示,用户穿戴好所述外骨骼数据手套,将所述遥操纵杆手柄固定在夹持单元上,并保证整个系统信息通讯正常,用户的手指动作信息由所述外骨骼数据手套的位置传感器获取并传送至上位机,用户的手部整体空间位置信息由所述遥操纵杆获取并传送至上位机,上位机对采集到的数据进行分析综合,发出相应的控制信号给远端机器臂控制器,控制机械手和机械臂完成相应动作。另外,机械手上装有的力传感器会实时采集机械手的压迫力,作为反馈力传回给上位机系统,上位机经过运算将控制信号发送给所述外骨骼数据手套控制器,从而控制驱动电机,带动驱动缆绳和指尖内部压片,实现手指部位相应大小的力反馈。此外,上位机同样将运算得到的力反馈控制信号发送给遥操纵杆,完成用户整条手臂上可感知的力反馈,从而实现更全面、更真实的力反馈。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
一种基于外骨骼数据手套和遥操纵杆的遥操作系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0