

IPC分类号 : B62D5/04,B62D3/04,B62D6/00,B62D113/00,B62D119/00,B62D137/00






专利摘要
本实用新型公开了一种具有多种转向模式的无人驾驶汽车转向装置,包括:转向轴,其一端与方向盘相连接;转向器一端与转向轴的另一端相连接,另一端与车轮相连接;第一电磁离合器设置在转向轴上,用于转向轴的通断;第一蜗轮蜗杆,其设置在第一电磁离合器与转向盘之间;第二蜗轮蜗杆,其设置在第一电磁离合器与转向器装置之间;两个电机,其与第一蜗轮蜗杆和第二蜗轮蜗杆相连接;第二电磁离合器设置在电机和第一蜗轮蜗杆之间;第三电磁离合器设置在电机和第二蜗轮蜗杆之间,满足驾驶员驾驶乐趣的同时,能够实现快速、精确的转换模式的转换。
权利要求
1.一种具有多种转向模式的无人驾驶汽车转向装置,其特征在于,包括:
转向盘;以及
转向轴上部,其一端与所述转向盘相连接;
转向轴下部;
第一电磁离合器,其设置在所述转向轴上部的另一端和所述转向轴下部的一端之间,用于使所述转向轴上部的另一端和所述转向轴下部的一端选择性的分离或者结合;
转向器,其与所述转向轴下部的另一端相连接,且同时与车轮相连接;
第一蜗轮,其固套在所述转向轴上部上;
第一蜗杆,其一端与所述第一蜗轮相啮合;
第一电机;
第二电磁离合器,其设置在所述第一蜗杆的另一端和所述第一电机的动力输出轴之间,用于使所述第一蜗杆的另一端和所述第一电机的动力输出轴选择性的分离或者结合;
第二蜗轮,其固套在所述转向轴下部上;
第二蜗杆,其一端与所述第二蜗轮相啮合;
第二电机;
第三电磁离合器,其设置在所述第二蜗杆的另一端和所述第二电机的动力输出轴之间,用于使所述第二蜗杆的另一端和所述第二电机的动力输出轴选择性的分离或者结合。
2.如权利要求1所述的具有多种转向模式的无人驾驶汽车转向装置,其特征在于,所述转向器包括:
转向齿轮轴,其一端与所述转向轴下部的另一端相连接,另一端为齿轮结构。
3.如权利要求2所述的具有多种转向模式的无人驾驶汽车转向装置,其特征在于,所述转向器还包括:
转向齿条,其与所述齿轮结构相啮合。
4.如权利要求3所述的具有多种转向模式的无人驾驶汽车转向装置,其特征在于,还包括:
万向节,其设置在所述转向齿轮轴和转向轴下部之间。
5.如权利要求4所述的具有多种转向模式的无人驾驶汽车转向装置,其特征在于,还包括:
两个转向横拉杆,其一端分别设置在所述转向齿条的两端。
6.如权利要求5所述的具有多种转向模式的无人驾驶汽车转向装置,其特征在于,还包括:
两个梯形臂,其一端分别与所述两个转向横拉杆的另一端相连接。
7.如权利要求6所述的具有多种转向模式的无人驾驶汽车转向装置,其特征在于,还包括:
两个转向节,其一端分别与所述两个梯形臂的另一端相连接,另一端分别与车轮相连接。
说明书
技术领域
本实用新型涉及无人驾驶汽车技术领域,更具体的是,本实用新型涉及一种具有多种转向模式的无人驾驶汽车转向装置。
背景技术
近年来,随着科学技术的快速发展和人们环保意识的不断增强,传统内燃机汽车销量持续萎靡,环保、高效、节能的智能汽车成为汽车行业的研究热点。伴随着人工智能、大数据和5G等技术的快速发展,无人驾驶汽车更是成为智能汽车领域的研究热门。无人驾驶汽车又被称为轮式移动机器人,其主要依靠车内以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。从20世纪70年代开始,美国、德国和英国等西方国家便开始对无人驾驶汽车进行研究,1986年NavLabl发布了全球第一辆由计算机驾驶的汽车,2015年特斯拉推出半自动驾驶系统Autopilot,2016年Uber无人驾驶汽车正式上路测试。从20世纪80年代开始,我国开始研究无人驾驶汽车,1992年国防科技大学成功研制出中国第一辆真正意义上的无人驾驶汽车,2005年上海交通大学成功研制国内首辆城市无人驾驶汽车,2014年互联网巨头百度公司启动了无人驾驶汽车研发计划,2018年阿里巴巴团队研制的无人驾驶车辆具备了在开放路段测试的能力。
在现有技术条件下,L4级别的无人驾驶技术还不成熟,加之关于无人驾驶法律法规的制定尚处于起步阶段,全自动驾驶汽车产品的大规模应用还遥遥无期,此外,基于人性化和个性化的设计要求,为满足相当一部分驾驶员的驾驶乐趣,即便在未来,配有手动驾驶模式的无人驾驶汽车依然具有较广阔的应用前景。现阶段推出的无人驾驶汽车一般都有两套操作系统:一是机器操作系统,对应全自动驾驶模式;二是驾驶员操作系统,对应手动驾驶模式。相应的是,无人驾驶汽车也应具有两套转向系统:全自动转向系统和手动转向系统。
汽车的转向系统是汽车行驶系统的重要组成部分,汽车转向系统的功用是使汽车按照驾驶员的意图控制行驶方向。汽车转向系统经历了纯机械转向系统、液压助力转向系统、电动助力转向系统、线控转向系统和全自动转向系统等发展阶段。纯机械转向系统将转向盘和转向轮通过纯机械结构连接,其优势是驾驶真实感高,但驾驶员容易疲劳。助力转向系统可以有效节省驾驶员的体力,而且能够获得转向时的转向阻力反馈,使驾驶员获得良好的路感。线控转向取消了转向盘和转向轮间的机械连接,完全由电能提供动力,其设计和布置灵活,但驾驶的真实感不如纯机械转向系统而且故障率高。全自动转向系统根据无人驾驶汽车的雷达、相机和其它各种传感器等获得的实时信号控制汽车转向系统,完全解放了驾驶员,但也使得汽车爱好者失去了驾驶乐趣。基于此,有必要设计一种具有多种转向模式的无人驾驶汽车转向装置,实现多种驾驶风格的切换,提供多种驾驶体验,满足驾驶员的驾驶乐趣;同时设计该系统的转向工作过程,当任何一种转向模式发生故障时,转向系统可以快速切换至另一种安全的转向模式,保证转向行驶的安全性和可靠性。
实用新型内容
本实用新型的目的是设计开发了一种具有多种转向模式的无人驾驶汽车转向装置工作过程,解决了目前的技术不足之处,通过两组电机与蜗轮蜗杆和多个电磁离合器的配合,实现了多种汽车转向系统的切换,满足驾驶员驾驶乐趣的同时,能够实现快速、精确的转换模式的转换。
本实用新型提供的技术方案为:
一种具有多种转向模式的无人驾驶汽车转向装置,包括:
转向盘;以及
转向轴上部,其一端与所述转向盘相连接;
转向轴下部;
第一电磁离合器,其设置在所述转向轴上部的另一端和所述转向轴下部的一端之间,用于使所述转向轴上部的另一端和所述转向轴下部的一端选择性的分离或者结合;
转向器,其与所述转向轴下部的另一端相连接,且同时与车轮相连接;
第一蜗轮,其固套在所述转向轴上部上;
第一蜗杆,其一端与所述第一蜗轮相啮合;
第一电机;
第二电磁离合器,其设置在所述第一蜗杆的另一端和所述第一电机的动力输出轴之间,用于使所述第一蜗杆的另一端和所述第一电机的动力输出轴选择性的分离或者结合;
第二蜗轮,其固套在所述转向轴下部上;
第二蜗杆,其一端与所述第二蜗轮相啮合;
第二电机;
第三电磁离合器,其设置在所述第二蜗杆的另一端和所述第二电机的动力输出轴之间,用于使所述第二蜗杆的另一端和所述第二电机的动力输出轴选择性的分离或者结合。
优选的是,所述转向器包括:
转向齿轮轴,其一端与所述转向轴下部的另一端相连接,另一端为齿轮结构。
优选的是,所述转向器还包括:
转向齿条,其与所述齿轮结构相啮合。
优选的是,还包括:
万向节,其设置在所述转向齿轮轴和转向轴下部之间。
优选的是,还包括:
两个转向横拉杆,其一端分别设置在所述转向齿条的两端。
优选的是,还包括:
两个梯形臂,其一端分别与所述两个转向横拉杆的另一端相连接。
优选的是,还包括:
两个转向节,其一端分别与所述两个梯形臂的另一端相连接,另一端分别与车轮相连接。
本实用新型所述的有益效果:
本实用新型设计开发的一种具有多种转向模式的无人驾驶汽车转向装置,通过两组电机与蜗轮蜗杆和多个电磁离合器的配合,驾驶员可以通过模式选择按键任意选择全自动转向、纯机械转向、电动助力转向和线控转向等四种转向模式,实现了多种汽车转向系统的切换,满足驾驶员驾驶乐趣的同时,能够实现快速、精确的转换模式的转换。
附图说明
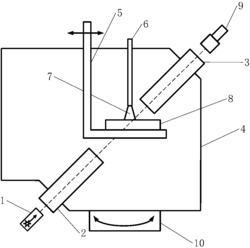
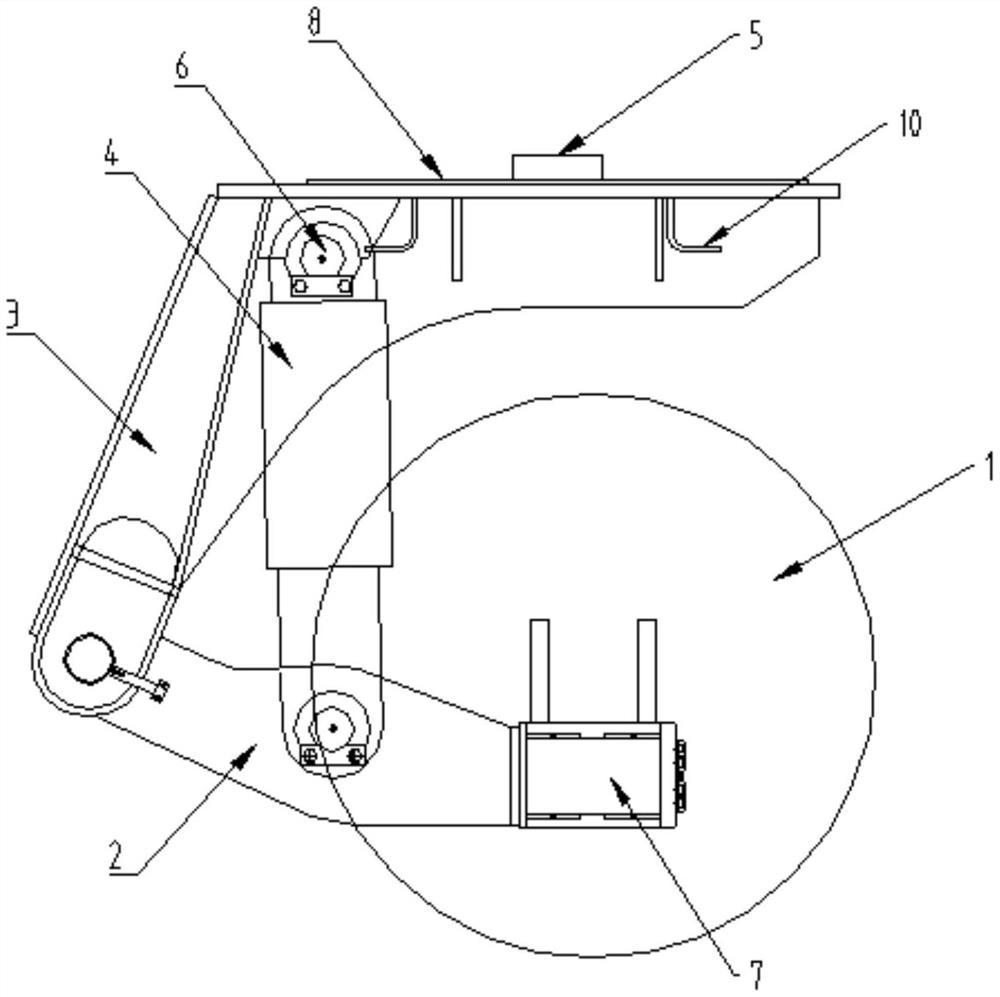
图1为本实用新型所述具有多种转向模式的无人驾驶汽车转向装置的结构示意图。
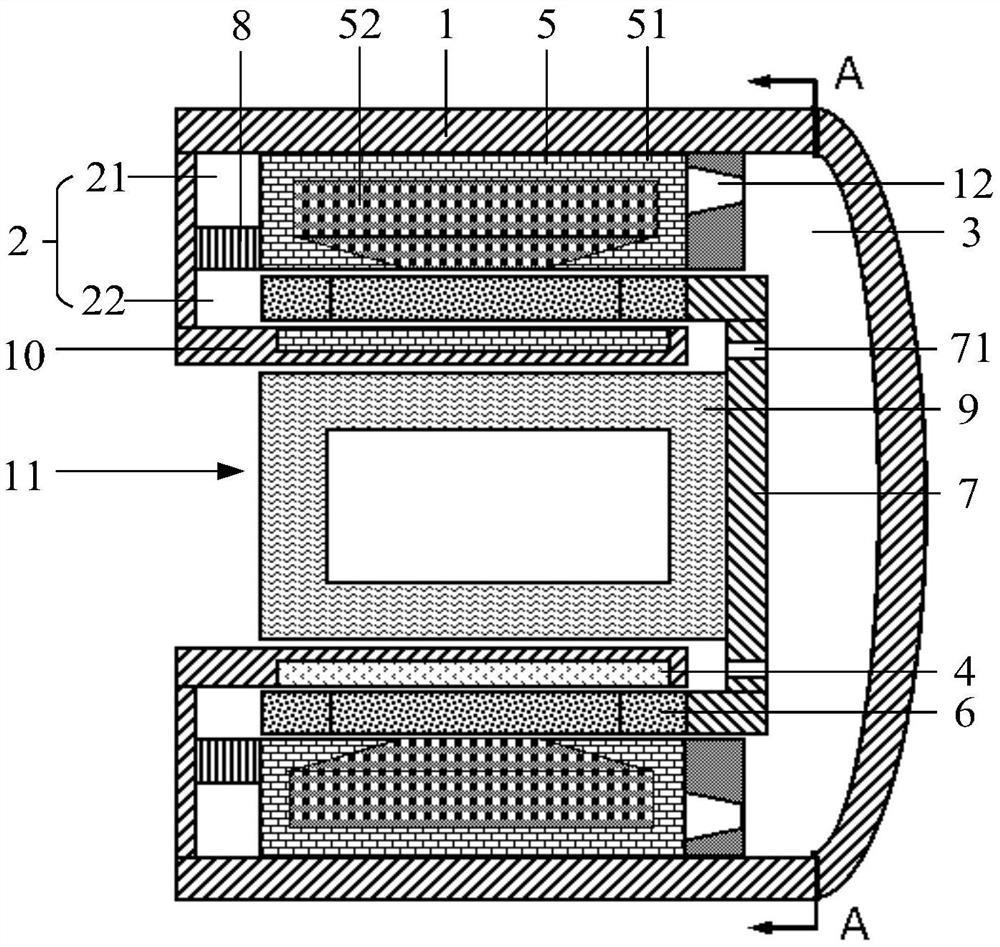
图2为本实用新型所述模式选择和信息显示器的结构示意图。
图3为本实用新型所述具有多种转向模式的无人驾驶汽车转向装置的工作过程的示意图。
具体实施方式
下面结合对本实用新型做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
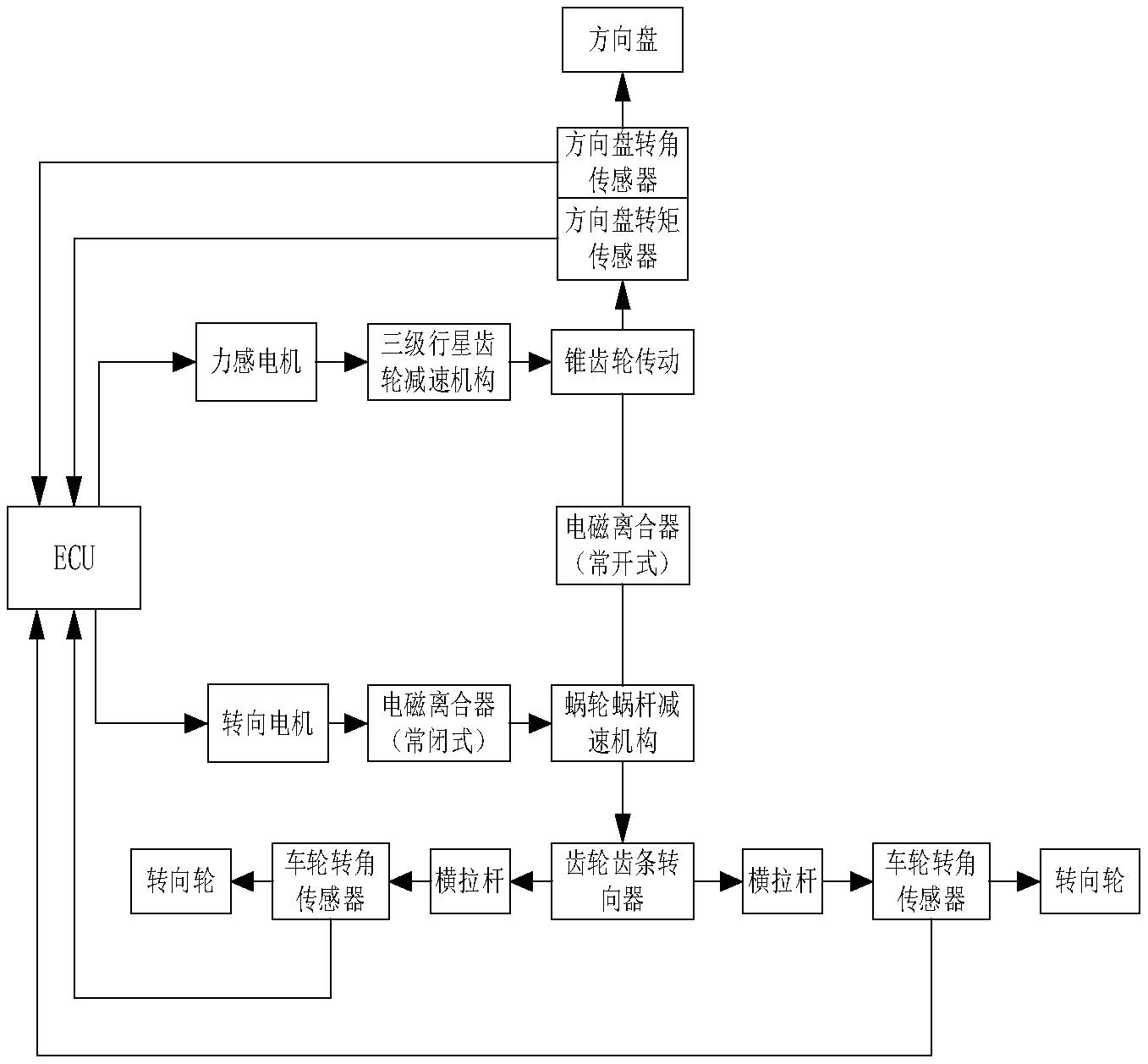
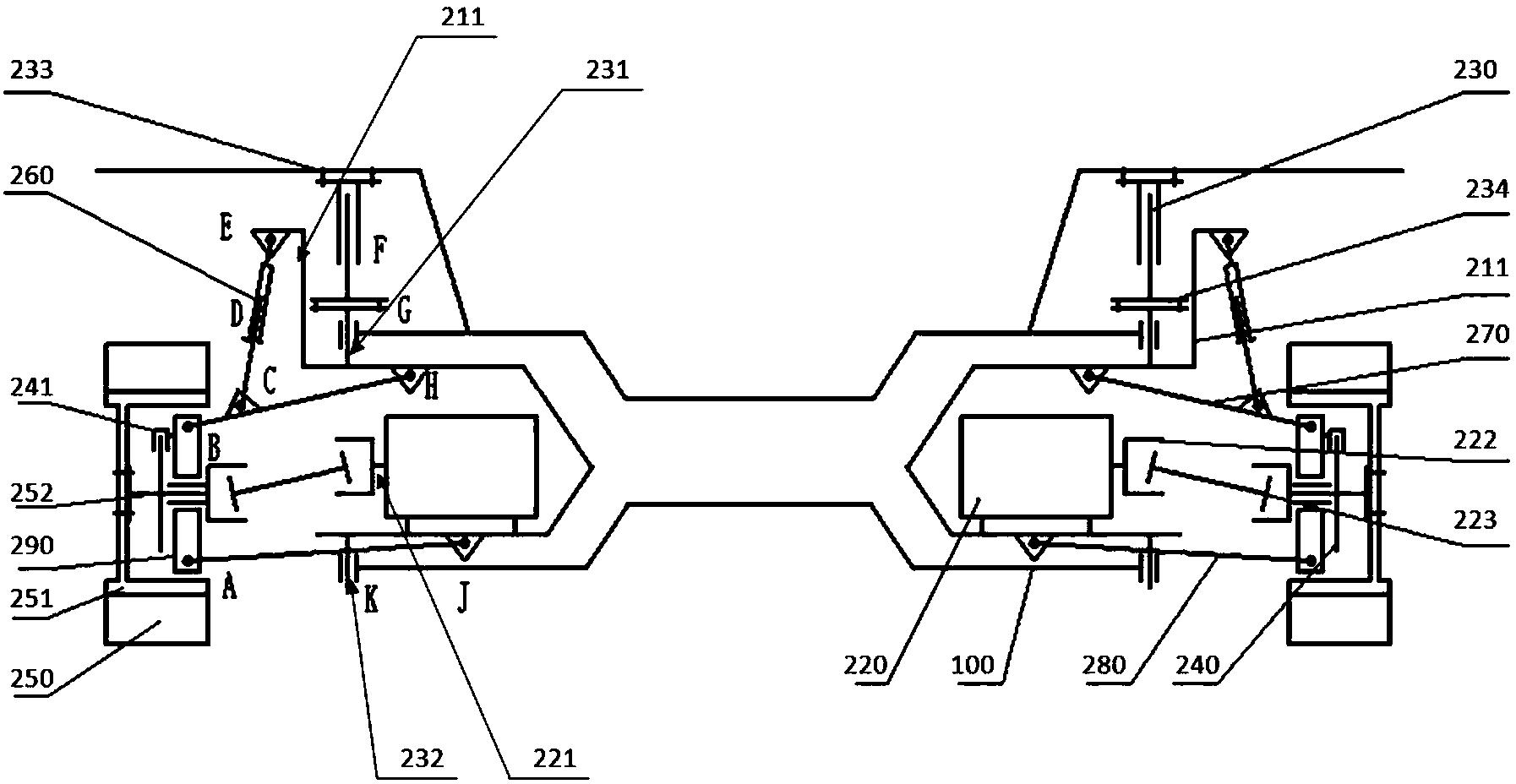
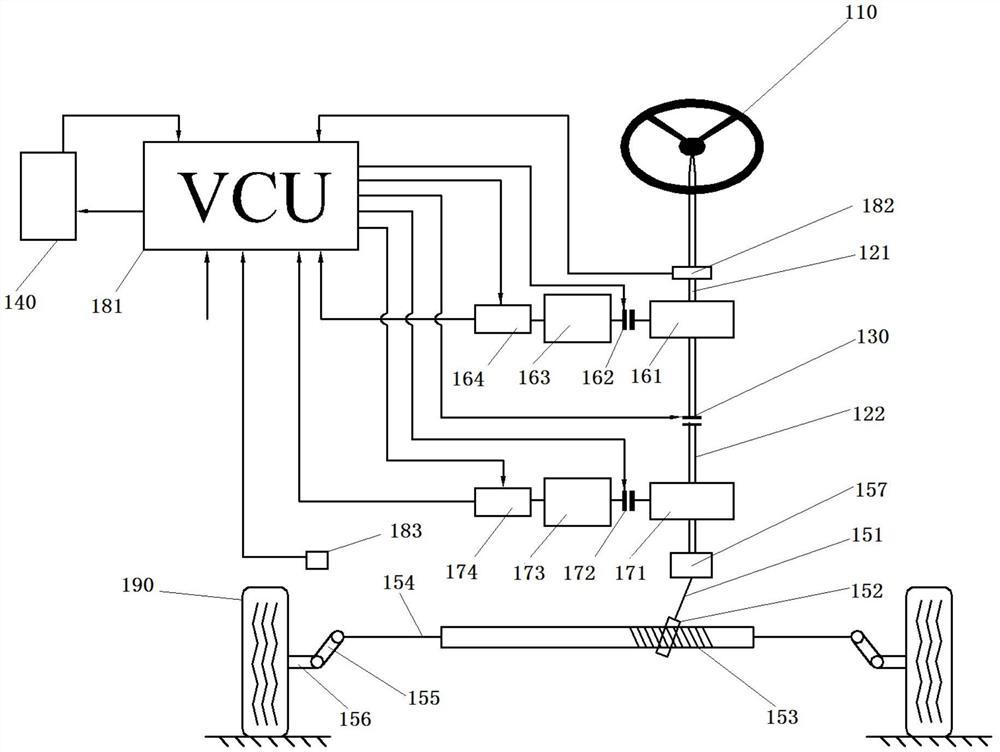
如图1所示,本实用新型提供的一种具有多种转向模式的无人驾驶汽车转向装置包括:转向盘110、转向轴上部121、转向轴下部122、第一电磁离合器130、模式选择和信息显示器140、转向器输入轴151、转向齿轮152、转向齿条153、两个转向横拉杆154、两个梯形臂155、两个转向节156、万向节157、第一涡轮和第一蜗杆161、第二电磁离合器162、第一电机163、第一电机驱动电路164、第二涡轮和第二蜗杆171、第三电磁离合器172、第二电机173、第二电机驱动电路174、VCU181、转向盘传感器182和车轮转角传感器183;其中,转向盘110,其用于驾驶员输入转向力矩;转向轴上部121一端与所述转向盘110相连接,另一端与所述第一电磁离合器130相连接,第一电磁离合器130同时与转向轴下部122的一端相连接,第一电磁离合器130用于实现转向轴上部121和转向轴下部122的通断,转向轴下部122的另一端通过万向节157与转向器输入轴151相连接,转向器输入轴151与转向齿轮152相连接形成转向齿轮轴,转向齿轮152为齿轮结构,转向齿条153与转向齿轮152相啮合,用于将转向齿轮152的转动转化为转向齿条153的横向运动;两个转向横拉杆154,其一端分别设置在所述转向齿条153的两端;两个梯形臂155,其一端分别与所述两个转向横拉杆154的另一端相连接;两个转向节156,其一端分别与所述两个梯形臂155的另一端相连接,另一端分别与车轮190相连接;第一蜗轮和第一蜗杆结构161,其设置在所述转向轴上部121上;第一电机163的动力输出轴与第二电磁离合器162的一端相连接,第二电磁离合器162的另一端与所述第一蜗轮和第一蜗杆结构161相连接,第一电机163用于为转向系统提供动力,第一蜗轮和第一蜗杆结构161用于将所述第一电机163发送的力矩传递至转向轴上部121,第二电磁离合器162用于第一电机163和第一蜗杆之间的通断;第二蜗轮和第二蜗杆结构171,其设置在所述转向轴下部122上;第二电机173,其动力输出端与第三电磁离合器172的一端相连接,第三电磁离合器172的另一端与第二蜗轮和第二蜗杆结构171相连接,第二蜗轮和第二蜗杆结构171用于将第二电机173发送的力矩传递至转向轴下部122;转向盘传感器182,其设置在所述转向轴上部121上,用于监测所述转向盘110的转角和转矩;车轮转角传感器183,其设置在车轮主销后侧的车架上,用于监测车轮190的转角;模式选择和信息显示器140,包括一侧的模式选择界面和另一侧的信息显示界面,模式选择界面用于采集驾驶员选择的转向模式信息,信息显示界面用于呈现车辆的运动状态信息;VCU181用于接受和处理所述转向盘传感器182、所述模式选择和信息显示器140和车轮转角传感器183发送的信号,并管理所述第一电磁离合器130、第二电磁离合器162、第三电磁离合器172、第一电机163和第二电机173的工作状态;第一电机163通过第一电机驱动电路164与VCU181相连接,第二电机173通过第二电机驱动电路174与VCU181相连接,第一电机驱动电路164和第二电机驱动电路174在第一电机163、第二电机173和VCU181间传递信号,所述转向盘传感器182和车轮转角传感器183所测信息经至VCU181处理后传送至模式选择和信息显示器140;VCU181通过导线与第一电磁离合器130连接并管理第一电磁离合器130的工作状态,实现转向轴上部121和转向轴下部122的通断;所述VCU181通过导线与第二电磁离合器162连接并管理第二电磁离合器162的工作状态,实现第一电机163和第一蜗轮和第一蜗杆结构161之间的通断;VCU181通过导线与第三电磁离合器172连接并管理第三电磁离合器172的工作状态,实现第二电机173和第二涡轮和第二蜗杆结构171之间的通断;当第一电机163工作且第二电磁离合器162闭合时,第一电机163产生的动力驱动第一涡轮和第一蜗杆结构161运动;当第二电机173工作且第三电磁离合器172闭合时,第二电机173产生的动力驱动第二涡轮和第二蜗杆结构171运动;通过第二电磁离合器162与第一电机163连接,第一涡轮和第一蜗杆结构161可以将第一电机163传来的驱动转矩转化为驱动转向轴120转动的转矩;通过第三电磁离合器172与第二电机173连接,第二涡轮和第二蜗杆结构171可以将第二电机173传来的驱动转矩转化为驱动转向轴120转动的转矩。
如图2所示,所述模式选择和信息显示器140上包括两部分:一侧是信息显示界面,其具体包括四个信息栏:当前的驾驶模式、转向盘运动信息、转向轮运动信息、转向系故障信息;另一侧是模式选择界面,其具体包括:全自动驾驶、纯机械驾驶、第一电动助力转向模式、第二电动助力转向模式、线控转向驾驶模式;所述模式选择界面键选的转向模式显示在信息显示界面中的当前驾驶模式信息栏中,所述转向盘传感器182测得的转向盘转角和转矩信息显示在信息显示界面中的转向盘运动信息栏中,所述车轮转角传感器183测得的转向轮转角信息显示在信息显示界面中的转向轮运动信息栏中,所述VCU181测得的转向系统故障及处理信息显示在信息显示界面中的转向系故障信息栏中。
本实用新型设计开发的一种具有多种转向模式的无人驾驶汽车转向装置,本实用新型设计开发的一种具有多种转向模式的无人驾驶汽车转向装置,通过两组电机与蜗轮蜗杆和多个电磁离合器的配合,驾驶员可以通过模式选择按键任意选择全自动转向、纯机械转向、电动助力转向和线控转向等四种转向模式,实现了多种汽车转向系统的切换,满足驾驶员驾驶乐趣的同时,能够实现快速、精确的转换模式的转换。
如图3所示,本实用新型所述的一种具有多种转向模式的无人驾驶汽车转向装置的工作过程具体包括如下步骤:
步骤一:VCU181接受并处理转向盘传感器182、模式选择和信息显示器140、车轮转角传感器183传递的信号,并判断驾驶员选择的转向模式;
步骤二:根据驾驶员选定的转向模式,管理第一电磁离合器130、第二电磁离合器162和第三电磁离合器172的工作状态(闭合或者断开)和第一电机163、第二电机173的工作状态(工作或者不工作),实现所选转向模式的执行;
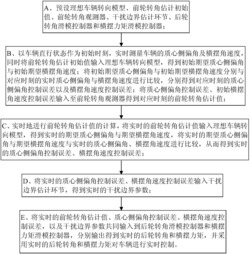
步骤三:不含纯机械转向模式,按照全自动转向模式、第一电动助力转向模式、第二电动助力转向模式、线控转向的顺序进行故障诊断和处理,故障诊断和处理可以保证任何一种转向模式发生故障时,转向系统可以快速切换至另一种安全的转向模式,保证转向行驶的安全性和可靠性。
其中,步骤一中驾驶员选择的转向模式包括四种类型和五种情况,四种类型为纯机械转向、电动助力转向、线控转向和全自动转向,五种情况为纯机械转向、第一电动助力转向模式、第二电动助力转向模式、线控转向和全自动转向。
步骤二中五种不同的执行情况如下:
情况一、纯机械转向模式的工作过程为:第一电磁离合器130闭合,转向轴上部121和转向轴下部122上下连通,第二电磁离合器162和第三电磁离合器172断开,第一电机163与第一涡轮和第一蜗杆结构161断开连接,第二电机173和第二涡轮和第二蜗杆结构171断开连接,此时第一电机163和第二电机173不工作,驾驶员驱动转向系统;
情况二、第一电动助力转向模式的工作过程为:第一电磁离合器130闭合,转向轴120上下连通,第二电磁离合器162闭合,第一电机163与第一涡轮蜗杆161连通,第三电磁离合器172断开,第二电机173和第二涡轮蜗杆171断开,此时第一电机163工作,第二电机173不工作,驾驶员和第一电机163驱动所述转向系统;
情况三、第二电动助力转向模式的工作过程为:第一电磁离合器130闭合,转向轴120上下连通,第二电磁离合器162断开,第一电机163与第一涡轮蜗杆161断开,第三电磁离合器172闭合,第二电机173和第二涡轮蜗杆171连通,此时第一电机163不工作,第二电机173工作,驾驶员和第二电机173驱动所述转向系统;
情况四、线控转向模式的工作过程为:第一电磁离合器130断开,转向轴120上下断开,第二电磁离合器162闭合,第一电机163与第一涡轮蜗杆161连通,第三电磁离合器172闭合,第二电机173和第二涡轮蜗杆171连通,此时第一电机163工作,第二电机173也工作,第二电机173驱动所述转向系统,第一电机163根据实时路况产生相应的转向阻力矩为驾驶员提供良好的路感,驾驶员将驱动力矩提供给转向盘110,第一电机163提供的阻力矩与驱动力矩相反,为驾驶员提供一个阻力,目的是将路面情况反馈给驾驶员,提高驾驶真实性;
情况五、全自动转向模式的工作过程为:第一电磁离合器132断开,转向轴120上下断开,第二电磁离合器162断开,第一电机163与第一涡轮蜗杆161断开,第三电磁离合器172闭合,第二电机173和第二涡轮蜗杆171连通,此时第一电机163不工作,第二电机173工作,第二电机173驱动转向系统,在此模式下驾驶员被完全解放出来。
步骤三中的故障诊断和处理具体包括如下步骤:
步骤1、判断当前是否为全自动转向模式:
若是,则再判断第二电机173是否发生故障:
若第二电机173发生故障,则转向系统的第三电磁离合器172断开,第一电磁离合器132闭合,即切换至纯机械转向模式;
若第二电机173没有故障则继续保持全自动转向模式不变;
若当前不是全自动转向模式则转到步骤2;
步骤2、判断当前是否为第一电动助力转向模式:
若是,则再判断第一电机163是否发生故障:
若第一电机163发生故障,则第二电磁离合器162断开,即切换至纯机械转向模式;
若第一电机163没有故障则继续保持第一电动助力转向模式不变;
若当前不是第一电动助力转向模式则转到步骤3;
步骤3、判断当前是否为第二电动助力转向模式:
若是,则再判断第二电机173是否发生故障:
若第二电机173发生故障,则第三电磁离合器172断开,即切换至纯机械转向模式;
若第二电机173没有故障则继续保持第二电动助力转向模式不变;
若当前不是第二电动助力转向模式则转到步骤4;
步骤4、判断当前是否为线控转向模式:
若是,则再判断第一电机163是否发生故障:
若第一电机163发生故障,则再判断第二电机173是否发生故障,若第二电机173也发生故障,则第二电磁离合器162断开,第三电磁离合器172断开,第一电磁离合器132闭合,即切换至纯机械转向模式;
若第二电机173没有故障,则第二电磁离合器162断开,第一电磁离合器132闭合,即切换至第二电动助力转向模式;
若第一电机163没有发生故障,则再判断第二电机173是否发生故障,若第二电机173发生故障,则第三电磁离合器172断开,第一电磁离合器132闭合,即切换至第一电动助力转向模式;
若第二电机173没有发生故障,则继续保持线控转向模式不变。
尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的实施例。
一种具有多种转向模式的无人驾驶汽车转向装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0