







![二环[3.n.1]化合物及其制备方法](https://www.zhichawang.com/images/ui/CN2015103200790/CN2015103200790.jpg)
专利摘要
本发明公开了一种用于超分辨光刻精密掩模的智能校正装置控制系统,所述控制系统结合光学系统实现精确的预期掩模形变控制。所述智能控制系统总控制通过高性能工控机完成,所述智能控制系统包括上位机控制系统,图像采集分系统、图像处理分系统,对准分系统,照明分系统及十六路独立微调掩模形变控制分系统。通过所述控制系统各分系统的联合控制,可实现期望的精密掩模形变控制,较于现有的实现方法步骤更加简便,控制系统的实现也更加的经济。另外所述控制系统采用了PCIe通道及独立显卡对对准图像信号进行传输及处理,掩模精密形变控制采用PID闭环控制算法实现精密调控,提高了分系统效率,使得系统可以更快更准确的实现掩模形变控制及对准。
权利要求
1.一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:包括十六路气动微调掩模形变控制分系统和对准分系统,所述十六路气动微调掩模形变控制分系统包括力传感器检测反馈分系统,气压输出控制分系统,PLC实现的PID控制器分系统,所述对准分系统包括八路图像采集CCD、八路图像采集卡、图像处理器及八路照明分系统,所述图像采集CCD采集的图像数据通过图像采集卡与高性能上位机进行传输,上位机通过图像处理器对相关图像进行预处理,然后反馈至中控系统,为对准程序提供图像支持,所述照明系统通过信号发生器连接位相调制器,产生激励信号,从而使得氦-氖激光器发出的光通过调制后经相关光路及光纤传输通道为CCD连接的远心镜头提供照明。
2.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述控制总线采用标准控制总线。
3.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述十六路气动微调掩模形变控制分系统采用基于TCP/IP协议的工业以太网总线。
4.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述十六路气动微调掩模形变控制分系统采用可自定义的工业以太网总线。
5.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述十六路气动微调掩模形变控制分系统还包括PLC控制分系统及模拟量输入输出扩展模块,PLC内部PID控制器,掩模受力检测力传感器反馈分系统,气压-输出力控制分系统。
6.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述对准分系统采用基于TCP/IP协议的工业以太网总线。
7.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述对准分系统采用可自定义的工业以太网总线。
8.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述对准分系统采用基于PCIe X4的PCIe总线。
9.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述对准分系统采用可自定义的PCIe总线。
10.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述对准分系统采用基于USRT的RS232串口通信总线。
11.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述对准分系统采用可自定义的RS232串口通信总线。
12.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述对准分系统包括多通道图像采集分系统,图像传输分系统,图像处理分系统,图像采集调节电机控制分系统,照明分系统。
13.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述对准分系统采用可自定义的RS232串口通信总线。
14.根据权利要求1所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述智能校正装置控制系统包括:高性能工控机,用于智能校正装置控制系统运行及图像处理高速运算。
15.根据权利要求5所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述PLC控制分系统包括:PLC控制器,用于提供十六路PID控制器,完成输出力闭环控制算法;模拟量输入扩展模块,用于力传感器模拟量输入转换,完成反馈力D/A转换;还用于输入气压检测,完成D/A转换;模拟量输出扩展模块,用于电气比例阀控制信号输出,完成A/D转换;输出数字量输出扩展模块,用于气缸输出换向控制,完成气缸推出及缩回控制,该过程通过控制中间继电器启动相应换向电磁阀完成;数字量输入扩展模块,用于传感信号接收。
16.根据权利要求12所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述多通道图像采集分系统包括:多路高像素CCD,用于图像采集,远心镜头,用于配合CCD使用。
17.根据权利要求12所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述图像传输分系统包括:图像采集卡,单块图像采集卡用于四通道CCD采集数据传输,图像采集卡包括触发器,用于外部触发条件接收,采集卡内部系统程序,用于整个采集卡工作应用,PHY收发器,用于将从以太网接口接收的数据通过系统程序处理后传送至PCIe接口,四个DDR RAM,用于内部程序运行内存提供。
18.根据权利要求12所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述图像处理分系统包括:高性能图像处理器,该图像处理器采用NVIDIA公司的RTX 2080SUPER图形处理显卡,用于将图像采集卡采集及简单预处理后的数据进行综合处理,最终将处理后的图像数据传输至中控系统。
19.根据权利要求12所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述图像采集调节电机控制分系统包括:紧凑型线性位移台,用于CCD位置调整,多通道运动控制器,用于配合紧凑型线性位移台运动控制。
20.根据权利要求12所述的一种用于超分辨光刻精密掩模的智能校正装置控制系统,其特征在于:所述照明分系统包括:氦-氖激光器,用于产生波长为633nm的光,聚焦镜,把准直光聚焦到光缆里,准直镜,用于把光缆的输出光变成准直,光缆,用于光信号传输,适配器用于光纤端头和远心物镜的连接,位相调制器,用于相关输出光信号的调制,信号发生器,用于产生位相调制器的激励信号。
说明书
技术领域
本发明涉及一种超分辨光刻机智能控制系统,尤其涉及一种光刻机智能控制系统的精密掩模校正。
背景技术
随着半导体行业的不断发展,光刻机作为半导体技术的核心设备,可以说没有光刻机就没有半导体。光刻机经历了接近、接触式光刻机,步进重复投影光刻机,步进扫描光刻机的发展历程。光刻机的高速发展也是在自动化及智能化高速发展推动下实现的。随着半导体集成电路技术的快速发展,对光刻机的系统设计提出了更高的要求。一方面,对光刻机曝光线宽要求的不断增高,另一方面对光刻机曝光效率的不断提升,这些使得光刻机控制系统的设计与开发要求都变得越来越高,对测量设备的精度要求,控制系统的智能化程度也不断增高。
基于表面等离子体的超分辨光刻项目的发展使得我国在光刻机研发的道路上提供了一条全新的技术路线,该技术可有效解决曝光线宽的问题。而对准精度及精密套刻精度的提高是对曝光效率提升的主要途径,解决当前问题的技术包括自对准双图案化技术(SADP)及定向自组长(DSA)技术,但前一种方法实施步骤复杂,且所需的方法实施起来成本较高,第二种方法目前技术尚不完备,在这种情况下就需要更加快捷,成本低可靠性高的方式对对准精度进行提高。当前的控制系统中图像处理采集方式多采用USB串口传输或以太网口传输,这些传输方式的传输速度比较慢,后续通过控制系统处理的效率将会降低,并且所有的图像处理工作由上位机控制系统完成,这样极大的加重了上位机的工作负担,将会导致整个系统的处理速度变慢,降低对准效率。针对该问题,当前也需要更高控制精度的控制系统,通过此控制系统能够准确、快速、稳定的完成对准及掩模校正。
发明内容
本发明所要解决的技术问题是提供一种用于超分辨光刻精密掩模的智能校正装置控制系统,具有更高的掩模形变控制精度。
为了实现上述目的,本发明采用如下技术方案予以实现:
一种用于超分辨光刻精密掩模的智能校正装置控制系统,包括十六路气动微调掩模形变控制分系统和对准分系统。所述十六路气动微调掩模形变控制分系统包括PLC控制分系统,掩模受力检测反馈分系统,气压输出-力输出控制分系统。
所述对准分系统包括多通道图像采集分系统,图像传输分系统,图像处理分系统,图像采集调节电机控制分系统,照明分系统。
所述对准分系统包括八路图像采集CCD、八路图像采集卡、图像处理器及八路照明分系统,所述图像采集CCD采集的图像数据通过图像采集卡与高性能上位机进行连接,上位机内置图像处理器进行相关图像处理,反馈至中控系统,以供对准使用。所述照明系统通过信号发生器连接位相调制器,从而使得氦-氖激光通过相关光路到达与CCD连接的远心镜头。
所述十六路气动微调掩模形变控制分系统通过基于TCP/IP的以太网通信总线与上位机总控系统进行同步通信。
所述十六路气动微调掩模形变控制分系统以太网通信总线采用支持交叉自适应功能的设计。
所述十六路气动微调掩模形变控制分系统采用可自定义的工业以太网总线。
所述十六路气动微调掩模形变控制分系统的PLC控制分系统还包括:十六路PID控制器,模拟量输入扩展模块,模拟量输出扩展模块,输出数字量输出扩展模块,数字量输入扩展模块,中间继电器,器件供电电源。
所述十六路气动微调掩模形变控制分系统的掩模受力检测反馈分系统还包括:十六路力传感器,力传感器供电电源,力传感器检测电压信号模拟量输出。
所述十六路气动微调掩模形变控制分系统的气压输出-力输出控制分系统还包括:十六路电气比例阀,十六路气缸,及相应的换向电磁阀。
所述十六路气动微调掩模形变控制分系统通过PLC内部PID控制器实现力传感器检测信号-气缸气压输出压力的模拟量-模拟量闭环控制系统,通过比例控制器,微分控制及积分控制器实现掩模受作用力的控制,从而实现掩模形变控制。
所述对准分系统通过基于TCP/IP的以太网通信总线与上位机总控系统进行同步通信。
所述对准分系统通过基于PCIe的图像采集卡进行图像传输。
所述对准分系统的多通道图像采集分系统包括八路高像素CCD及远心光学镜头。
所述对准分系统的图像传输分系统包括图像采集卡,图像采集卡包括触发器,采集卡内部系统程序,PHY收发器,多通道DDR RAM。
所述对准分系统的图像处理分系统包括:高性能图像处理器,RTX 2080SUPER图形处理显卡。
所述对准分系统的调节电机控制分系统包括:紧凑型线性位移台,多通道运动控制器。
所述对准分系统的明分系统包括:氦-氖激光,聚焦镜,准直镜,光缆,连接适配器,位相调制器,信号发生器。
所述对准分系统的调节电机控制分系统采用基于USRT的RS232串口通信。
所述对准分系统的图像采集系统采用基于PCIe X4的PCIe总线对图像进行传输。
所述智能控制系统控制器采用高性能工作站,其中CPU采用2×E5 2620 V3,RAM32GB,SSD 256GB。
本发明与现有技术相比的优点在于:通过所述控制系统的方式结合光学系统可实现期望的精密掩模形变控制,较于现有的实现方法步骤更加简便,控制系统的实现也更加的经济,并且所述控制系统采用了PCIe通道进行图像信号传输,整个控制系统的反应速度也更快,提高了对准效率,也能更快更准确的实现掩模形变控制及对准。所述控制系统的精密掩模形变控制系统通过高精度力传感器及电气比例阀进行检测和控制,保证了掩模形变控制的精度调节。所述控制系统的掩模形变控制采用PID控制算法实现输出力的闭环调试,该闭环系统实现调控时间短,响应快速,系统运行稳定,实际测试输出力控制误差±0.03N,控制精度高。所述控制系统的CCD对准通过高精度电机实现X,Y,Z轴的定位控制,可更高效的完成图像采集及对准,为较高套刻精度提供成像支持。
附图说明
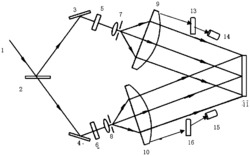
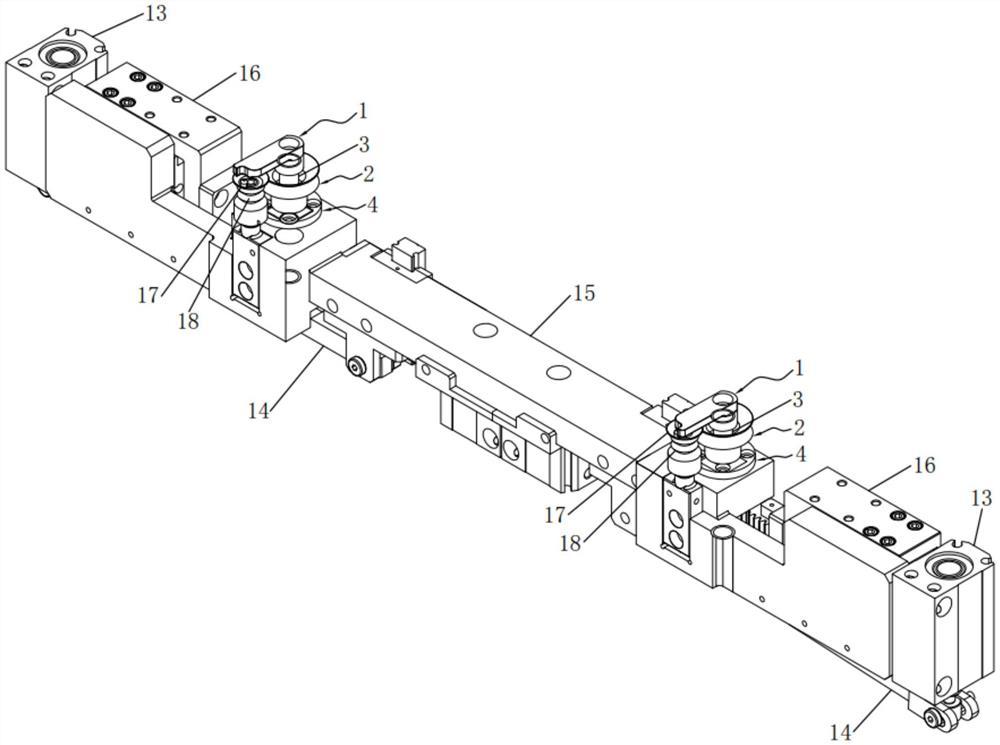
图1是本发明实施例中所述应用于超分辨光刻精密掩模校正装置控制系统的结构示意图;
图2是本发明实施例中所述图像采集卡的内部结构及通道示意图;
图3是本发明实施例中所述十六路独立微调掩模形变控制机构的S7 1200PLC控制系统整体设备组态示意图;
图4是本发明实施例中所述十六路独立微调掩模形变控制机构中单路微调控制结构示意图;
图5是本发明实施例中所述十六路独立微调掩模形变控制机构中单路微调PID控制环路结构示意图;
图6是本发明实例中所述十六路独立微调掩模形变控制机构中单路气动回路结构示意图;
图中所示:100上位机总控系统;101控制总线;102上位机控制器;103图像处理卡;104图像采集卡;105电机控制器;106位相调制器;107PLC控制器;110PCIe传输通道;112图像处理卡PCIe传输通道;120以太网传输通道;122八路CCD以太网传输通道;130串口通信总线通道;132八路电机控制器串口通信通道;130光纤通道;140光纤传输通道;143氦氖-激光位相调制照明分系统光纤传输通道;150数字量及模拟量控制通道;154力传感器、电气比例阀模拟量传输通道;200对准分系统;300照明分系统;400十六路独立微调控制分系统。
具体实施方式
下面结合附图及具体实施方式对本发明进行详细说明,但本发明的保护范围并不仅限于下面实施例,应包括权利要求书中的全部内容。而且本领域技术人员从以下的一个实施例即可实现权利要求中的全部内容。
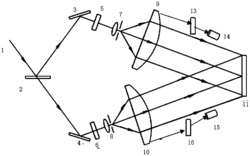
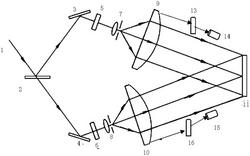
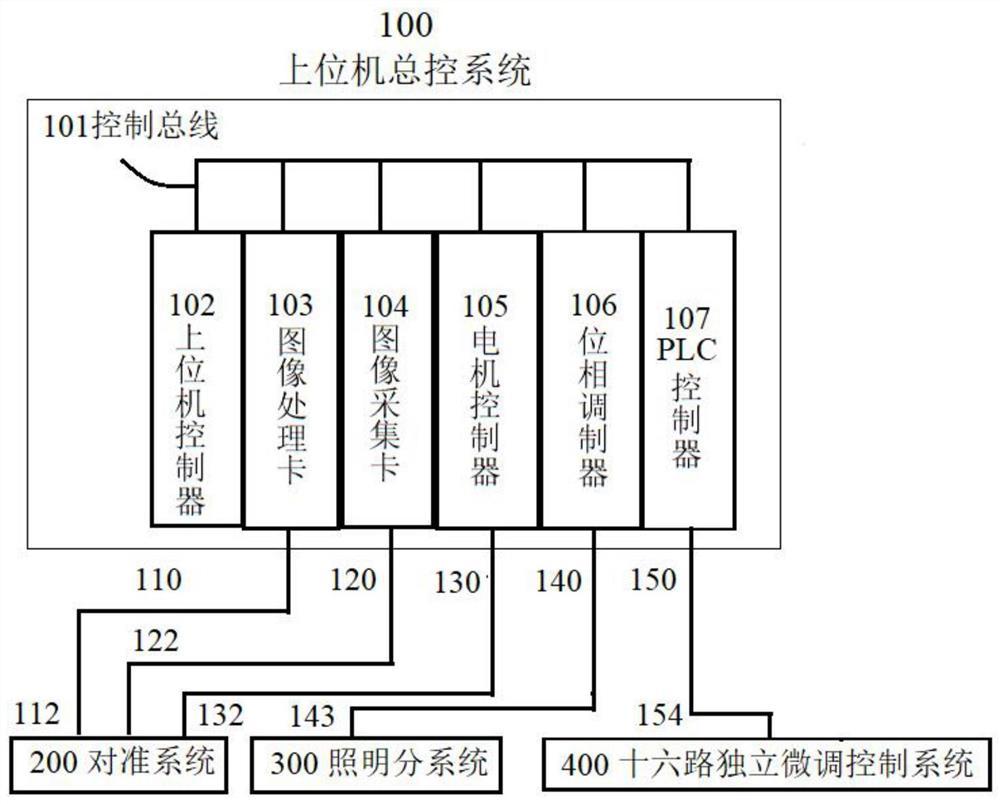
如图1所示,本发明的精密掩模校正装置控制系统包括上位机总控系统100、控制总线101、上位机控制器102、图像处理卡103、图像采集卡104、电机控制器105、位相调制器106、PLC控制器107;所述图像采集卡103通过PCIe传输通道110与外部连接,图像采集卡104通过以太网传输通道120与外部连接;电机控制器105通过串口通信总线通道130与外部连接;位相调制器106通过光纤传输通道140与外部连接;PLC控制器107通过数字量及模拟量控制通道150与外部连接。
所述对准分系统200通过图像处理卡PCIe传输通道112与图像处理卡103进行连接,所述对准分系统200通过八路CCD以太网传输通道122与图像采集卡104进行连接,所述对准分系统200通过八路电机控制器串口通信通道132与电机控制器105进行连接;所述照明分系统通过氦氖-激光位相调制照明分系统光纤传输通道143与位相调制器106进行连接;所述十六路独立微调控制分系统400通过力传感器、电气比例阀模拟量传输通道154与PLC控制器107进行连接。
相应的,本发明的精密掩模校正装置控制方法包括:
上位机总控系统100中主要通过中控程序通过PCIe传输通道110采集图像处理卡103处理后的图像结果,根据实际的需求对图像进行处理,结合处理后的图像对对准进行判断及相应操作。上位机总控系统100通过串口通信总线通道130控制电机根据实际需求进行位移微调,从而达到工作要求。上位机总控系统100通过基于TCP/IP的工业以太网与PLC控制器107进行通信,根据实际的掩模形变控制需求对PLC控制器107下发控制指令,后续相关操作由PLC控制器107完成下位机控制。
图像处理卡通103通过RTX 2080SUPER高性能显卡作为处理器,图像采集卡103接收到的数据通过PCIe传输通道110传输至图像处理卡103,进而图像处理卡103对数据进行处理,传送至上位机总控系统100。而图像采集卡103采用XILINX XC3S4000-4FGG900C FPGA芯片作为处理器,单块图像采集卡103可以采集四个以太网传输通道122传输的图像数据。此次共使用两块图像采集卡103进行八个通道的CCD图像数据采集。
电机控制器105通过控制八个紧凑型线性位移台的运动位置及配合手动位移台来调整CCD图像采集的位置。
氦-氖激光器产生的波长为633nm红光经过准直、聚焦后,信号发生器产生激励信号,位相调制器106对其进行调制,最后将光通过光纤传输通道140输出至远心镜头,远心镜头连接CCD,为CCD提供照明,本发明共使用八个CCD对掩模四边的八个点进行观测。
PLC控制器107扩展模拟量输入模块、模拟量输出模块、数字量输入模块、数字量输出模块以及供电电源模块。模拟量输入模块对力传感器采集的掩模形变受力值进行A/D转换,将力传感器的模拟量电压信号转换为内部系统可用的数字量信号,通过PLC控制器提供的PID控制器,对输出力设定值与检测到的掩模受力进行比较,通过PID算法对模拟量输出模块控制的电气比例阀进行输出模拟量转换,该过程中通过PID控制器调控后的数字输出值传送至模拟量输出模块,模拟量输出模块实现D/A转换,以此控制电气比例阀启动电压信号的改变,此过程还要通过控制中间继电器来驱动电磁阀,以此推出或缩回洁净气缸,气缸的输出力将作用于掩模上,通过控制十六气缸输出力作用于掩模四边的十六个点上,以此控制掩模的形变。
如图2所示,本次采用的图像采集卡104内集成XILINX公司的FPGA芯片XC3S4000-4FGG900C,采用X4PCI 二代接口,总共提供2GB/s带宽实现图像采集卡与上位机之间的数据传输。该图像采集卡104通过四个以太网端口接收来自CCD以太网接口传输的图像信息,本次发明实例所述控制系统共使用八个CCD,故采用两块图像采集卡104实现图像传输。图像采集卡104通过PCIe X4接口与上位机总控系统100进行连接,通过图像处理卡103进行相关图像处理。为使系统高速运行,减少指令发送延迟等,本次上位机控制器102采用双路志强E5 2620V3作为处理器,并配置32GB RAM以及256G SSD,保证系统高速运行。
图像采集卡103内部集成系统程序及控制程序,端口1-4接收的图像信息经过系统程序的初步处理后,PHY收发器将数据通过PCIe X4接口传输至上位机控制器102,图像采集卡103内部还集成4个DDR RAM,提供程序运行。
如图3所述,本次PLC控制系统107采用西门子S7-1200 CPU 1215C DC/DC/DC作为控制器,该CPU工作内存(集成):100kB,装载内存(集成):4MB,保持内存(集成)10kB,集成数字量I/O:14输入/10输出,集成模拟量I/O:2输入/2输出,过程映像区:1024字节输入/1024字节输出。S7-1200 PLC的基本数据类型长度达到32位,S7-1200 PLC支待Pointer、Any两种类型指针,使得S7-1200在编程时具有一定的灵活性。布尔执行速度,0.08μs/指令,移动字变量执行速度,1.7μs/指令,浮点数运算执行速度,2.3μs/指令。
PLC控制器107另外扩展模拟量输出模块,用于输出电气比例阀控制的电压信号,模拟量输入模块,用于实现力传感器及压力传感器输入的模拟量电压信号转换,数字量输出模块,用于对其他按钮、开关及中间继电器控制,数字量输入模块用于数字反馈信号的接入,包括气缸活塞推出限位开关等。
PLC控制器107提供的PID控制器用于完成气缸输出力的闭环控制,通过对现场安装后的设备进行PID实际调试,后续需要对气缸输出力,即掩模受力情况进行调整时,通过内部PID控制器对力传感器检测的受力情况及电气比例阀气压的输出情况进行调控,达到控制目的。PLC控制器107的供电系统由DC24电源提供,同时还为电气比例阀、力传感器、压力传感器、电磁阀等供电。
如图4所示,所述PLC控制器107通过工业以太网与上位机实现通信,PLC控制器107通过中间继电器控制电磁阀的通断实现气缸的推出及缩回,而通过电压型模拟量输出信号控制电气比例阀从而实现对输出气压的控制,以此达到控制气缸作用力输出的作用,从而实现对掩模作用力的控制,并实现对掩模形变的控制。而通过力传感器检测的气缸输出力电压型模拟量信号,结合PLC控制器107内部有PID控制器,达到闭环控制效果。
如图5所示,所述PLC控制器107提供十六路PID控制器,用于完成掩模形变控制。
该PID控制器函数方程为:
其中,y为PID算法的输出值,及系统中运算后的输出值。Kp为比例增益,S为拉普拉斯运算符,b为比例作用权重,w即设定值,x为过程值,即力传感器检测到的作用力,c为微分作用权重,TI为微分作用时间,TD为微分作用时间。
如图6所示,结合控制系统设计,针对器件及功能做出单路气动回路设计图,根据该设计,通过器件连接后,使用PLC控制器107内部集成的PID控制器进行输出力即输出气压调控,得到:输出气压最小可控至:2000Pa,输出力可控至±0.03N。
一种用于超分辨光刻精密掩模的智能校正装置控制系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0