









专利摘要
本发明涉及一种基于APM和I7智能芯片的联动组合自主导航无人船控制系统,包括地面控制中心和船载控制中心,船载控制中心又包括供电系统、通信系统、自主导航系统、推进动力系统和方向控制系统五个子系统;地面控制中心和船载控制中心间的连接通过地面控制中心中的定向全向天线与通讯系统这一子系统中定向全向天线间的WIFI无线网络以及其与方向控制系统这一子系统中的遥控被控模块间的2.4G网络来实现。本发明充分利用了APM系统和I7智能芯片的兼容性及I7智能芯片的运算能力和端口的兼容能力,有效实现了对无人船自主航行数据的传输、处理及存储,船载控制中心的数据存储能力可达512G,可支持8G运行内存。无人船1小时内可完成静止水面10公里往返自主航行任务。
权利要求
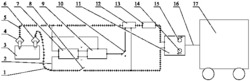
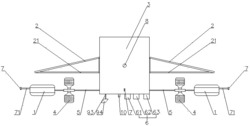
1.一种基于APM和I7智能芯片的联动组合自主导航无人船控制系统,其特征在于,包括地面控制中心(1)和船载控制中心(2)两个控制中心;地面控制中心由定向全向天线(3)、遥控器控制端(4)、I7智能芯片(5)和移动电池(6)构成;船载控制中心(2)包括有供电系统(7)、自动导航子系统(8)、推进动力系统(9)、方向控制系统(10)和通信系统(11)五个子系统;
通信系统(11)包括路由器(12)和定向全向天线(13),二者之间通过天线线缆进行连接;路由器(12)通过电线与供电系统(7)进行连接;定向全向天线(13)通过无线WIFI与地面控制中心(1)中的定向全向天线(3)进行连接;
自动导航子系统(8)包括GPS罗盘(14)、I7智能芯片(15)和APM系统(16),GPS罗盘(14)与I7智能芯片(15)间通过串口数据线及模块连接,I7智能芯片(15)通过电线与供电系统(3)连接,并通过无线数传与APM系统进行(16)连接,也通过RJ45网线与通讯系统(11)中的路由器(12)连接;
推进动力系统包括电调(17)、发动机(18)和船用电池(19);电调(17)通过电线分别与发动机(18)和船用电池(19)连接,并通过数控线与自动导航子系统(8)中的APM系统(16)进行连接;
方向控制系统(10)包括舵机(20)和遥控被控模块(21),二者都通过数控线与自动导航子系统(8)中的APM系统(16)进行连接;遥控被控模块(21)通过2.4G无线网络与所述地面控制中心(1)中的定向全向天线(3)进行连接。
说明书
技术领域
本发明属于计算机通信及自动化领域,特别是涉及一种基于APM和I7智能芯片的联动组合自主导航无人船控制系统。
背景技术
自主导航无人船是一种新型的水上监测平台,其中以河川、湖泊、水库、海岸及港湾等水域为对象,以小型船舶为载体,集成定位导航、通讯与控制设备,可搭载多种监测传感器,以遥控/自主的工作方式完成特定的水文和水环境要素监测。由于无人船具有布置灵活、成本经济、自动测量等特点,在水文要素观测、水环境监测、水库及河道泥沙淤积量评估、水利工程选址和水下考古等方面具有广阔的应用前景。
然而,随着无人船应用领域的逐渐扩展,在满足高精度定位于导航、精确灵活的船只控制、准确的姿态控制等功能要求的同时,也对无人船船只体积、控制系统能耗和专用性等方面提出更高的要求。不同传感器的集成特性要求越来越高,单位时间数据获取量的增加会给远程数据传输带来很大压力。此外,无人船相关控制算法的改性和先进控制算法的提出,都需要无人船的控制系统具有较高的数据处理、分析和传输能力。当前的控制系统存在系统集成度、数据处理能力和传输速率等方面的功能还较弱,这就要求设计出兼容性和可扩展性更好、系统集成度更高、数据处理能力更强和传输速率更快的无人船控制系统。
发明内容
本发明所要解决的技术问题是,提供一种基于APM和I7智能芯片的自主导航无人船控制系统,该系统通过船载控制中心和地面控制中心两个控制中心的构建和它们在不同航线区域距离间的协同作用,以及船载控制中心中的自动导航子系统中APM系统和I7智能芯片间良好的兼容性和I7智能芯片的运算能力和端口的兼容能力,有效提高无人航线数据的数据处理能力和传输速率,并提高无人船完成制定航线任务的效率。
为达到上述目的,本发明采取的技术方案是构建一种基于APM和I7智能芯片的自主导航无人船控制系统,该系统包括地面控制中心和船载控制中心两个控制中心,其中,地面控制中心由定向全向天线、遥控器控制端、I7智能芯片和移动电池构成;船载控制中心包括有供电系统、自动导航子系统、推进动力系统、方向控制系统和通信系统等五个子系统;
所述通信系统包括路由器和定向全向天线,二者之间通过天线线缆进行连接;路由器通过电线与所述供电系统进行连接;定向全向天线通过无线WIFI与所述地面控制中心中的定向全向天线进行连接;
所述自动导航子系统包括GPS罗盘、I7智能芯片和APM系统,GPS罗盘与I7智能芯片间通过串口数据线及模块连接,I7智能芯片通过电线与供电系统连接,并通过无线数传与APM系统进行连接,也通过RJ45网线与通讯系统中的路由器连接;
所述推进动力系统包括电调、发动机和船用电池;电调通过电线分别与发动机和船用电池连接,并通过数控线与所述自动导航子系统中的APM系统进行连接;
所述方向控制系统包括舵机和遥控被控模块,二者都通过数控线与所述自动导航子系统中的APM系统进行连接;遥控被控模块通过2.4G无线网络与所述地面控制中心中的定向全向天线进行连接。
本发明效果是:
(1)船载控制中心中的APM系统和I7智能芯片的结合具有很好的兼容性,该复合系统充分利用了I7智能芯片的运算能力和端口的兼容能力,可有效实现对APM处理系统的数据处理。在该复合系统运行下,无人船控制系统的数据存储能力可达512G,同时可支持8G运行内存。
(2)本发明的无人船控制系统中所设置地面控制中心和船载控制中心两个控制中心在无人船航行过程中,依据航行区域距离协同配合地对无人船航线数据进行传输、处理和储存,这种协同配合作用提高了无人船航线数据的传输速率,航行过程中,预设航点的数据处理速度可达1MB/S。同时,无人船航线数据传输和处理速度的提高,也提高了无人船完成制定航线任务的效率,无人船1小时内可完成静止水面10公里往返自主航行任务。
附图说明
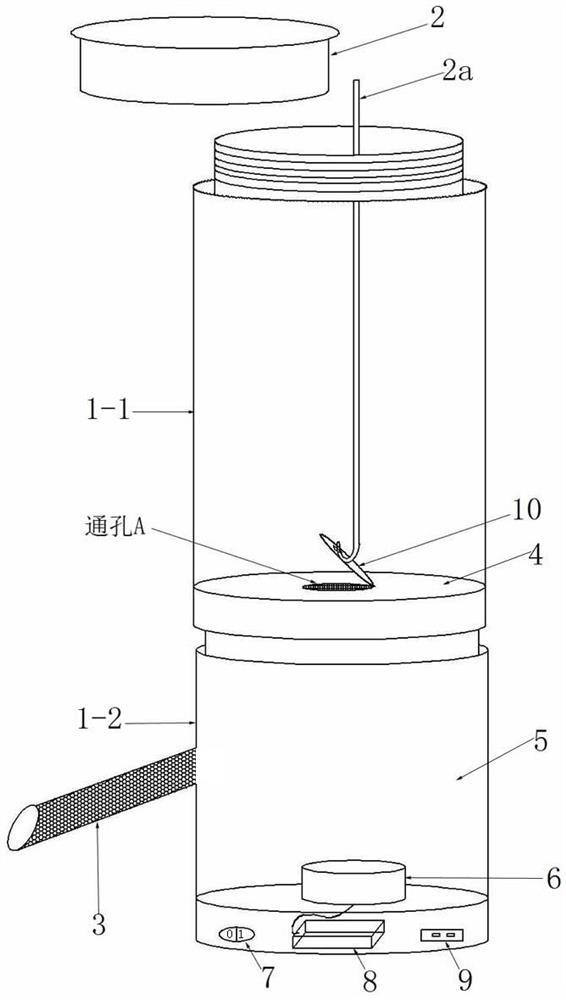
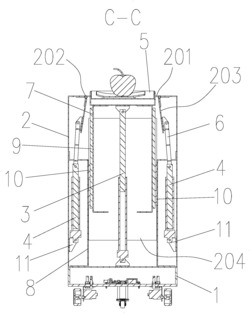
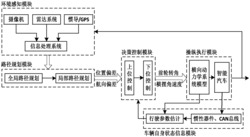
图1本发明的基于APM和I7智能芯片的联动组合自主导航无人船控制系统的构成图。
图中:1、地面控制中心;2、船载控制中心;3、定向全向天线;4、遥控器控制端;5、I7智能芯片;6、移动电池;7、供电系统;8、自动导航子系统;9、推进动力系统;10、方向控制系统;11、通信系统;12、路由器;13、定向全向天线;14、GPS罗盘;15、I7智能芯片;16、APM系统;17、电调;18、发动机;19、船用电池;20、舵机;21、遥控被控模块。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细说明。
如图1所示,本发明的基于APM和I7智能芯片的联动组合自主导航无人船控制系统的设计构建思想是,该系统针对现有无人船控制系统在数据处理能力和传输速率方面存在的不足,构建了地面控制中心1和船载控制中心2两个控制中心。在船载控制中心2的自动导航子系统8中充分利用APM系统16和I7智能芯片15间良好的兼容性及I7智能芯片15的运算能力和端口兼容能力,有效提高APM系统16的数据处理能力。该系统所设置的地面控制中心1和船载控制中心2两个控制中心通过2.4G无线网络和WIFI无线网络两个无线通讯网络进行连接,在无人船航行过程中,依据无人船航行区域距离分别对航点和航线数据进行传输和处理,通过两个控制中心的协同配合使用,提高无人船航线数据的传输速率,进而提高无人船完成制定航线任务的效率。依据附图对本发明所提供了基于APM和I7智能芯片的联动组合自主导航无人船控制系统控制下的无人船的自主导航过程以及航线数据传输过程说明如下:
在无人船开始航行前,首先在船载控制中心中的自动导航子系统8中的I7智能芯片15上设置航线和航点信息,预设完毕后,开启推进动力系统9中船用电池19的开关,并通过电调17给发动机18提供动力,无人船开始航行。在无人船航行过程中,无人船的航线和位置信息通过自动导航子系统8中的GPS罗盘14进行收集,并通过串口数据线及模块将收集的信息传输给I7智能芯片15,在I7智能芯片15中将所收集的信息与航行前预设的航线和航点信息进行对比分析,分析结果通过无线数传传输给APM系统16,也通过RJ45网线传输至通讯系统11中的路由器12,再经由天线线缆传输给定向全向天线13后,通过无线WIFI网络传输给地面控制中心1中的定向全向天线3,并通过天线线缆传输给I7智能芯片5。
在船载控制中心2中,当自动导航子系统8中的I7智能芯片15对所收集的信息的分析结果显示无人船航线和航点信息与I7智能芯片15预设的航点和航线信息一致时,无人船继续向前航行;当自动导航子系统8中的I7智能芯片15对所收集的信息的分析结果显示无人船航线和航点信息与I7智能芯片15设定的航线和航点信息出现偏差时,APM系统16会依据分析结果,通过数控线打开方向控制系统10中舵机20的开关,对无人船航行方向进行调整,使无人船航行方向回到自动导航子系统8中的I7智能芯片15所设置的航线和航点上。
在地面控制中心1中,I7智能芯片5会依据自动导航子系统8中的I7智能芯片15经由路由器12、定向全向天线13和定向全向天线3所传输的对比分析结果进行处理和分析。同样当自动导航子系统中8的I7智能芯片15对所收集的信息的分析结果显示无人船航线信息与I7智能芯片15设定的航线和航点信息一致时,无人船继续向前航行;当自动导航子系统8中的I7智能芯片15对所收集的信息的分析结果显示无人船航行方向和位置与I7智能芯片15所设定的航线和航点信息出现偏差时,I7智能芯片5会对航线会对航线信息进行调整,并在遥控器控制端4进行操作,操作指令传输至全向定向天线3后,通过2.4G无线网络传输至船载控制中心2中方向控制系统10中的遥控被控模块21,而后通过数控线传输至APM系统16,APM系统16再通过数控线打开方向控制系统10中舵机20的开关,对无人船航行方向和位置进行调整,使无人船航行方向和位置回到自动导航子系统8中的I7智能芯片15所预设的航线和航点上。
本发明的定向全向天线3采用(品牌:魏桥通信,型号:2400D300);遥控器控制端4采用(品牌:天地飞,型号:WFT06X-A);I7智能芯片5和15采用(PCM3-QM77);移动电池6采用(品牌:快乐易电,型号:Z80000);路由器12采用(品牌:AFOUNDRY,型号:EW500);定向全向天线13采用(品牌:LAFALINK,型号:LF-ANT2412);GPS罗盘14采用(U-BLOX NEO-M8N);APM系统16采用(ArduPilotMega控制器(2.8版本));电调17采用(品牌:酷跑QuicRun,型号:WP-1060ESC);发动机18采用(品牌:HASWING,型号:Osapian 40lbs);船用电池19采用(品牌:SaiL/风帆,型号:6-QW-105);舵机20采用(品牌:KKPI型号:1373);遥控被控模块21采用(品牌:天地飞,型号:WFR07S 2.4G)。
在无人船航行过程中,当无人船航行区域距离在400m范围以外时,通过船载控制中心2实现无人船航线和航点信息的收集、传输和调整工作;当无人船航行区域距离在400m范围内时,地面控制中心1辅助船载控制中心2对无人船航线和航点信息进行收集、传输和调整;如此,通过地面控制中心1和船载控制中心2两个控制中心间的协同配合作用,提高控制系统对无人船航线和航点数据的收集、分析和处理效率,进而提高无人船完成制定航线任务的效率。
实施例1
在长、宽、高分别为3300mm、850mm和420mm的船体中安装本申请所发明的无人船控制系统。无人船装置完毕后,在天津团泊湖对其自主航行性能和数据传输速率进行了测试。无人船航行前,在船载控制中心设置的航线区域为10公里,航点数量为20个。地面控制中心通过遥控控制终端辅助船载控制中心对无人船航线和航点位置进行调整和控制。测试结果发现,在无人船航行过程中,无人船航线和航点的数据传输速率达到1MB/S,在50分钟就完成了制定的航线任务。
综上所述,本发明的内容并不局限在上述的实施例中,相同领域内的有识之士可以在本发明的技术指导思想之内可以轻易提出其他的实施例,但这种实施例都包括在本发明的范围之内。
一种基于APM和I7智能芯片的联动组合自主导航无人船控制系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0