








专利摘要
本发明公开了一种基于工业机器人的复杂曲面电解加工工具及方法,涉及电解加工技术领域,工业机器人为六自由度机器人,还包括与工业机器人的执行端连接固定的阴极夹具、连接于阴极夹具前端的工具阴极、工作箱、设于工作箱内底部的回转工作台及设于回转工作台顶部的阳极定位夹紧装置。本发明能够实现航空发动机整体叶轮等复杂曲面工件的电解加工成形,具有无宏观切削力,能够加工高硬度的难切削材料、工具阴极无损耗的优势;工具阴极结构简单,设计及制造简单,稳定性好,绝缘、密封性能良好,同时,工具阴极上部做绝缘处理,避免非加工区的电化学溶解,减少杂散腐蚀,提高定域性,有利于提高加工精度和表面质量。
权利要求
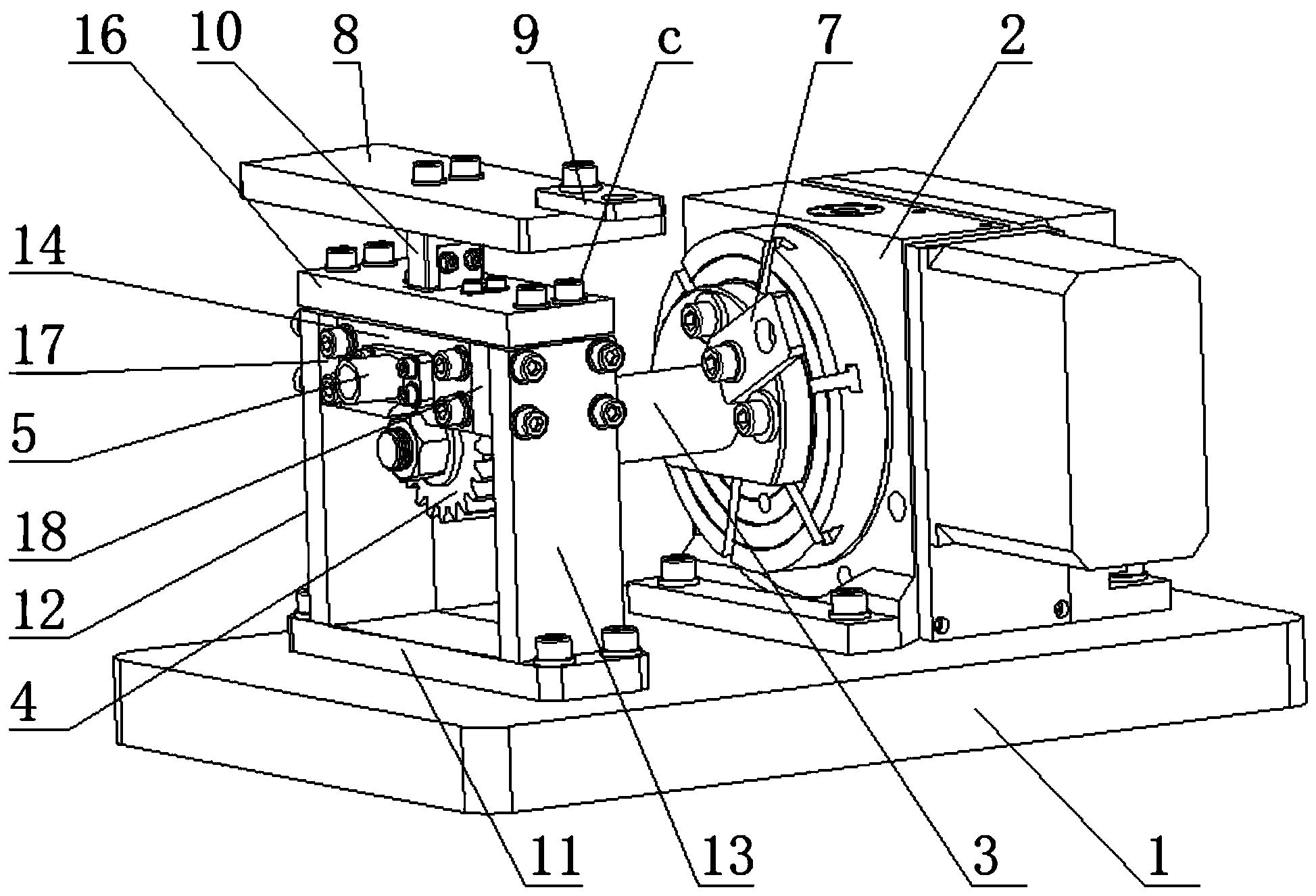
1.一种基于工业机器人的复杂曲面电解加工工具,所述工业机器人(1)为六自由度机器人,其特征在于:还包括与所述工业机器人(1)的执行端连接固定的阴极夹具(2)、连接于所述阴极夹具(2)前端的工具阴极(3)、工作箱(5)、设于所述工作箱(5)内底部的回转工作台(6)及设于所述回转工作台(6)顶部的阳极定位夹紧装置(4);所述阴极夹具(2)整体呈正交连通为T型的管状结构,其竖直部分末端设管接头(23),水平部分后端封闭且与所述工业机器人(1)连接固定,导电铜套(22)螺纹配合于所述水平部分前端内部,并通过密封圈(24)与所述水平部分密封连接,其与所述管接头(23)相同一侧设电源接头(25);电解液进液管道和电缆密封穿过所述工作箱(5)侧壁顶部设置,所述电解液进液管道通过所述管接头(23)与夹具体(21)连通,所述电缆通过所述电源接头(25)将电源负极与所述导电铜套(22)连通;
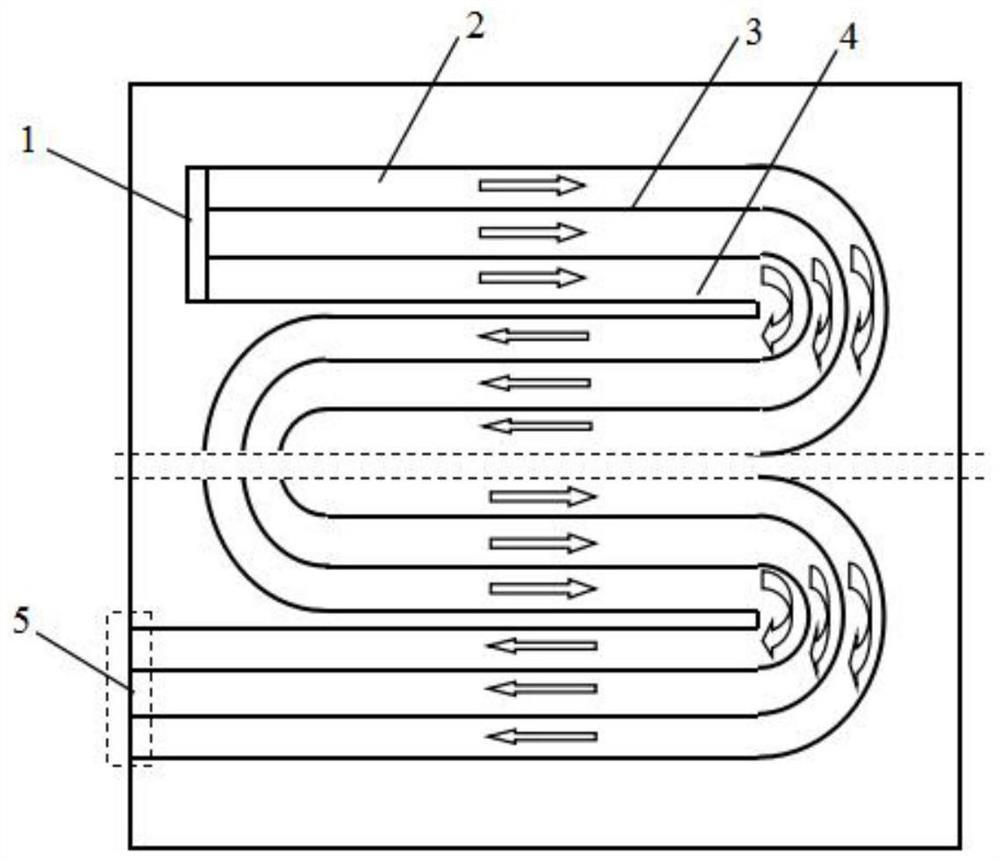
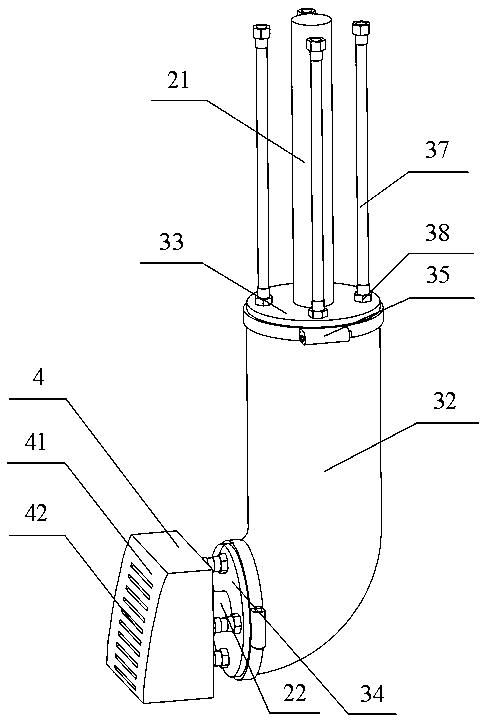
所述工具阴极(3)呈底壁为水平面、顶壁断面呈U型的管状结构,其前端开口为电解液入口(33)并设向外凸出的轴向定位凸台(31),后端封闭,底壁绝缘处理,后部顶壁和底壁对称设各孔型电解液出口(32),所述工具阴极(3)轴向贯穿所述导电铜套(22)设置,其前部配合于所述导电铜套(22)内,所述轴向定位凸台(31)贴合所述导电铜套(22)端面设置;所述导电铜套(22)侧壁垂直于阴极工具(3)轴线配合连接阴极紧定螺钉(34),所述阴极紧定螺钉(34)末端与所述阴极工具(3)的底壁抵接;所述水平部分、所述导电铜套(22)和所述工具阴极(3)同轴设置;
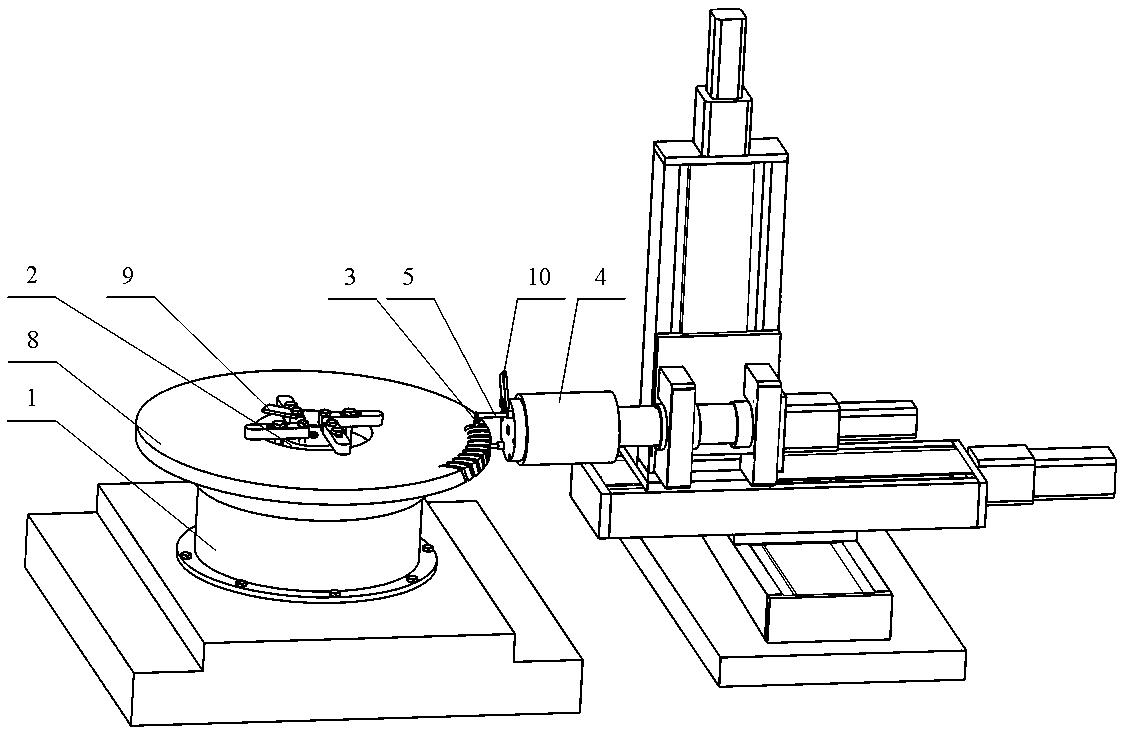
所述工作箱(5)呈箱状结构,其侧壁设导电铜排并对应所述工业机器人(1)执行端的位置开设安装孔,侧壁底部设排液孔(52),所述工业机器人(1)位于所述工作箱(5)外部,所述工具阴极(3)位于所述工作箱(5)内部;回转工作台(6)设于所述工作箱(5)内底部,并与所述工作箱(5)内底部区域隔离设置,其上设置阳极定位夹紧装置(4),工件(7)通过所述阳极定位夹紧装置(4)固定于所述回转工作台(6)上,所述回转工作台(6)位于所述阴极工具(3)下方。
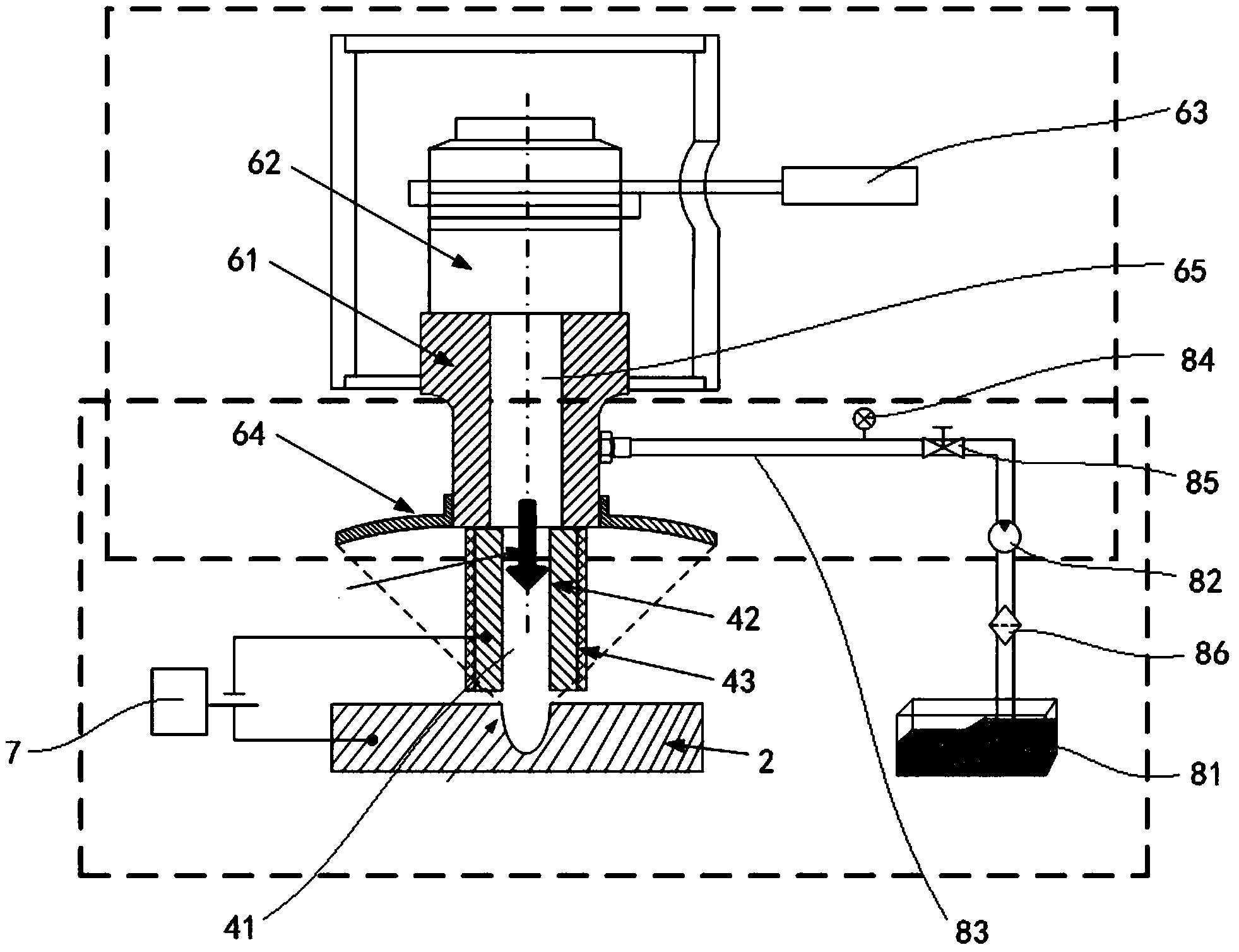
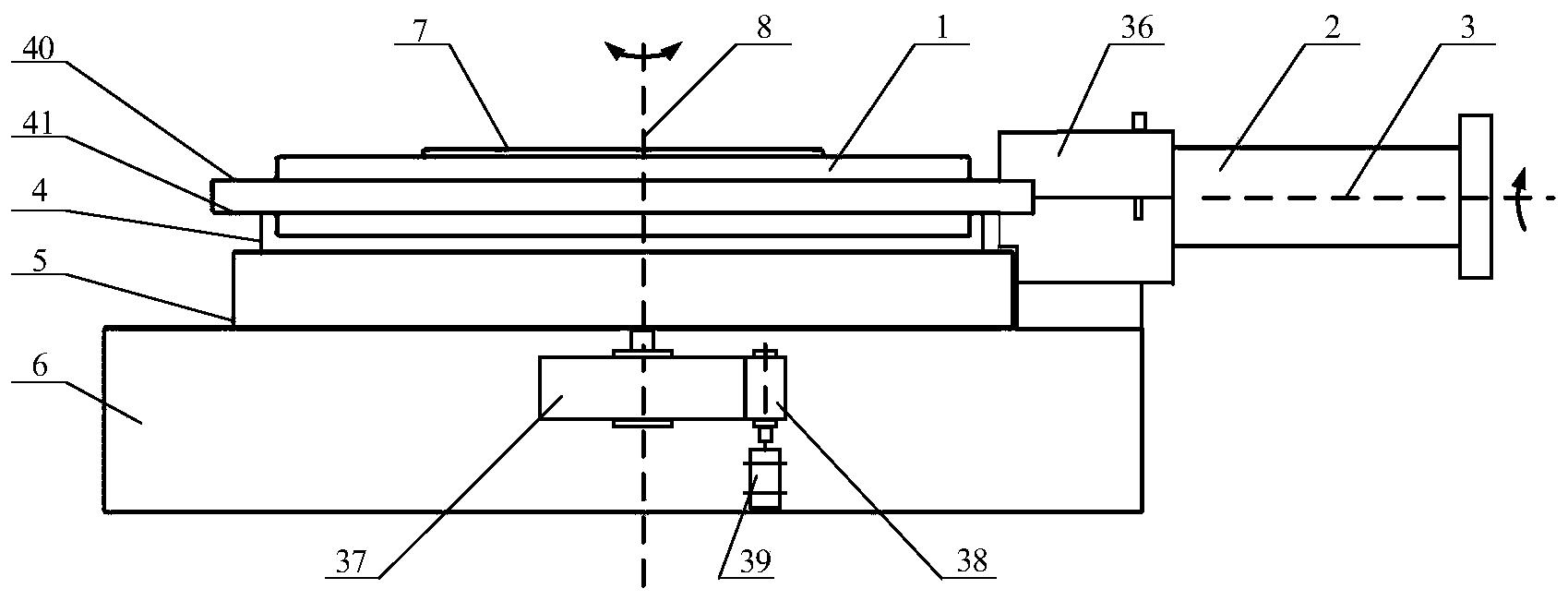
2.根据权利要求1所述的一种基于工业机器人的复杂曲面电解加工工具,其特征在于:所述阳极定位夹紧装置(4)由导电材料制成,长心轴(41)直立固连于底板上,对刀块(43)设于所述底板上表面边沿,圆柱销(42)设于所述底板上,位于所述长心轴(41)和所述对刀块(43)之间,端面定位板套接于所述长心轴(41)上,与所述长心轴(41)固连,位于所述圆柱销(42)上方,锁紧螺母(44)螺纹配合连接于所述长心轴(41)上构成所述阳极定位夹紧装置(4),所述底板通过各T型螺栓安装固定于所述回转工作台(6)顶部;所述工件(7)套接安装于所述长心轴(41)上,其底面与所述端面定位板贴合,所述圆柱销(42)顶端伸入所述端面定位板底部设置的底面孔内。
3.根据权利要求2所述的一种基于工业机器人的复杂曲面电解加工工具,其特征在于:所述工作箱(5)中部设有直立的分隔壁,所述分隔壁于所述工作箱(5)内中部隔离出与所述工作箱(5)内底部区域不连通的分隔区,所述回转工作台(6)设于所述分隔区内;所述分隔壁顶部设水平向外翻折的翻边。
4.根据权利要求3所述的一种基于工业机器人的复杂曲面电解加工工具,其特征在于:驱动电机的输出端通过传动机构连接回转主轴(64),所述回转主轴(64)的轴线竖直设置,支撑座(63)通过紧定螺钉(66)连接固定于所述回转主轴(64)顶部,工作转台(61)通过各工作台绝缘螺钉(65)连接固定于所述支撑座(63)顶部,所述工作转台(61)和所述支撑座(63)之间设有绝缘套(62),所述绝缘套(62)中部呈板状结构,边沿于所述翻边外侧竖直向下翻折,构成所述回转工作台(6)。
5.根据权利要求1所述的一种基于工业机器人的复杂曲面电解加工工具,其特征在于:所述工作箱(5)底面为由远离所述排液孔(52)向靠近所述排液孔(52)方向由高至低的倾斜面(51),所述倾斜面(51)的倾斜角度为10°。
6.根据权利要求1所述的一种基于工业机器人的复杂曲面电解加工工具,其特征在于:所述阴极夹具(2)后端连接法兰(11),所述法兰(11)与所述工业机器人(1)的执行端之间设绝缘垫(12),并通过各法兰绝缘螺钉(13)连接。
7.根据权利要求6所述的一种基于工业机器人的复杂曲面电解加工工具,其特征在于:所述安装孔处还设有风琴罩,所述风琴罩中部设柔性防护罩(55),所述柔性防护罩(55)通过喉箍与所述法兰(11)连接,所述风琴罩和所述柔性防护罩(55)将所述工业机器人(1)与所述工作箱(5)内区域隔离。
8.根据权利要求1所述的一种基于工业机器人的复杂曲面电解加工工具,其特征在于:所述夹具体(21)和所述管接头(23)由耐腐蚀绝缘材料制成。
9.根据权利要求2所述的一种基于工业机器人的复杂曲面电解加工工具,其特征在于:所述锁紧螺母(44)与工件(7)之间还设有开口垫圈。
10.根据权利要求4所述的一种基于工业机器人的复杂曲面电解加工工具的加工方法,其特征在于,包括以下步骤:
步骤一,将工具阴极(3)安装至导电铜套(22)内,然后将导电铜套(22)与夹具体(21)螺纹连接,并以密封圈(24)密封,再通过法兰(11)将所述夹具体(21)安装至工业机器人(1)执行端,安装时应当使所述工具阴极(3)的底壁朝下、顶壁朝上;将电解加工电源负极通过电缆和电源接头(25)与导电铜套(22)接通,并将电解液管道与管接头(23)连通;
步骤二,将工件(7)安装于长心轴(41)上,并通过锁紧螺母(44)和开口垫圈锁紧固定,然后将电解加工电源正极通过电缆与T型螺栓连接,以将电源正极与所述工件(7)接通;
步骤三,通过工作转台(61)将工件精确分度,再手动控制工业机器人,以对刀块(43)为基准调整所述工具阴极(3)的位置,并将对刀完成后的位置设定为基准位置;然后所述工具阴极(3)在所述工业机器人(1)的带动下进给至初始加工位置;
步骤四,加注电解液,并接通电解加工电源,所述工业机器人(1)带动所述工具阴极(3)六自由度复合进给运动,进行单个分度的复杂曲面加工;
步骤五,单个分度的复杂曲面加工结束后,断开电解加工电源并停止供给电解液,所述工业机器人(1)带动所述工具阴极(3)退回初始位置,工作转台(61)带动工件再次分度,重复步骤四,进行下一个分度的复杂曲面加工,直至所有分度的复杂曲面均加工完成。
说明书
技术领域
本发明涉及电解加工技术领域,具体涉及一种用于进行复杂曲面加工的基于工业机器人的电解加工工具及方法。
背景技术
随着新的技术革命不断取得进展和突破,具有复杂曲面的产品越来越多,这些产品广泛应用于模具、能源、交通、航空航天、航海等领域。例如,在航空航天领域中,复杂曲面的应用使新型航空器的推重比、可靠性和使用寿命大幅度提高;在国防领域,复杂曲面的应用使得军事装备打击精确性更高、性能更加优异等。复杂曲面产品的加工过程较为复杂,同时目前人力成本逐年上升,因此,复杂曲面产品多依靠工业机器人进行加工;工业机器人进行加工的过程中,既能够接受操作者的指挥进行工作,也能够按照事先编写好的程序,靠自身动力和控制能力来实现各种功能,自动执行工作,具有效率高,安全性好,可靠性强的特点。但现有的基于工业机器人的复杂曲面加工方法如多轴曲面数控加工、车削外轮廓曲面加工等,都具有一定的局限性,如具有较大的切削力、难以加工高硬度的难切削材料、加工效率较低、刀具损耗严重等。
电解加工是一种基于电化学阳极溶解而将工件加工成形的电化学加工方法,具有加工范围广、加工效率高、加工表面质量好、工具无损耗、不存在机械切削力、一次性成形以及可获得复杂几何形状的优点,因此成为机械制造业中的一种具有特殊作用的工艺方法。现阶段电解加工获得复杂曲面的加工方法有成形阴极拷贝式电解成形加工和多轴机床简单阴极扫掠成形加工两种方式。成形阴极拷贝式电解成形加工方式虽然能通过简单的送进运动完成复杂曲面的加工成形,但其成形阴极设计及制造困难,且制造周期长,阴极形状复杂、加工面积大,影响因素多,使得拷贝式加工的复制精度、重复精度都不高,尤其对于整体叶轮等复杂曲面整体构件,其叶栅通道狭窄扭曲,严重限制工具阴极的加工可达性,使得该方法难以实现加工。多轴机床简单阴极扫掠成形加工方式适应性强、复制性好、可编程,但是采用专用的复杂多轴机床,研发成本较高,且目前尚无具有完整自由度的成熟电解加工机床,限制了该加工方法的应用。
因此,迫切需要一种新型的电解加工工具,具备结构简单、适应性好、大幅度提高工具阴极的加工可达性等优点,有效完成复杂曲面工件的电解加工。
发明内容
本发明正是为了避免上述现有技术所存在的不足之处,提供了一种基于工业机器人的复杂曲面电解加工工具及方法。
本发明为解决技术问题采用如下技术方案:一种基于工业机器人的复杂曲面电解加工工具,所述工业机器人为六自由度机器人,还包括与所述工业机器人的执行端连接固定的阴极夹具、连接于所述阴极夹具前端的工具阴极、工作箱、设于所述工作箱内底部的回转工作台及设于所述回转工作台顶部的阳极定位夹紧装置;所述阴极夹具整体呈正交连通为T型的管状结构,其竖直部分末端设管接头,水平部分后端封闭且与所述工业机器人连接固定,导电铜套螺纹配合于所述水平部分前端内部,并通过密封圈与所述水平部分密封连接,其与所述管接头相同一侧设电源接头;电解液进液管道和电缆密封穿过所述工作箱侧壁顶部设置,所述电解液进液管道通过所述管接头与夹具体连通,所述电缆通过所述电源接头将电源负极与所述导电铜套连通;
所述工具阴极呈底壁为水平面、顶壁断面呈U型的管状结构,其前端开口为电解液入口并设向外凸出的轴向定位凸台,后端封闭,底壁绝缘处理,后部顶壁和底壁对称设各孔型电解液出口,所述工具阴极轴向贯穿所述导电铜套设置,其前部配合于所述导电铜套内,所述轴向定位凸台贴合所述导电铜套端面设置;所述导电铜套侧壁垂直于阴极工具轴线配合连接阴极紧定螺钉,所述阴极紧定螺钉末端与所述阴极工具的底壁抵接;所述水平部分、所述导电铜套和所述工具阴极同轴设置;
所述工作箱呈箱状结构,其侧壁设导电铜排并对应所述工业机器人执行端的位置开设安装孔,侧壁底部设排液孔,所述工业机器人位于所述工作箱外部,所述工具阴极位于所述工作箱内部;回转工作台设于所述工作箱内底部,并与所述工作箱内底部区域隔离设置,其上设置阳极定位夹紧装置,工件通过所述阳极定位夹紧装置固定于所述回转工作台上,所述回转工作台位于所述阴极工具下方。
进一步的,所述阳极定位夹紧装置由导电材料制成,长心轴直立固连于底板上,对刀块设于所述底板上表面边沿,圆柱销设于所述底板上,位于所述长心轴和所述对刀块之间,端面定位板套接于所述长心轴上,与所述长心轴固连,位于所述圆柱销上方,锁紧螺母螺纹配合连接于所述长心轴上构成所述阳极定位夹紧装置,所述底板通过各T型螺栓安装固定于所述回转工作台顶部;所述工件套接安装于所述长心轴上,其底面与所述端面定位板贴合,所述圆柱销顶端伸入所述端面定位板底部设置的底面孔内。
进一步的,所述工作箱中部设有直立的分隔壁,所述分隔壁于所述工作箱内中部隔离出与所述工作箱内底部区域不连通的分隔区,所述回转工作台设于所述分隔区内;所述分隔壁顶部设水平向外翻折的翻边。
进一步的,驱动电机的输出端通过传动机构连接回转主轴,所述回转主轴的轴线竖直设置,支撑座通过紧定螺钉连接固定于所述回转主轴顶部,工作转台通过各工作台绝缘螺钉连接固定于所述支撑座顶部,所述工作转台和所述支撑座之间设有绝缘套,所述绝缘套中部呈板状结构,边沿于所述翻边外侧竖直向下翻折,构成所述回转工作台。
进一步的,所述工作箱底面为由远离所述排液孔向靠近所述排液孔方向由高至低的倾斜面,所述倾斜面的倾斜角度为10°。
进一步的,所述阴极夹具后端连接法兰,所述法兰与所述工业机器人的执行端之间设绝缘垫,并通过各法兰绝缘螺钉连接。
进一步的,所述安装孔处还设有风琴罩,所述风琴罩中部设柔性防护罩,所述柔性防护罩通过喉箍与所述法兰连接,所述风琴罩和所述柔性防护罩将所述工业机器人与所述工作箱内区域隔离。
进一步的,所述夹具体和所述管接头由耐腐蚀绝缘材料制成。
进一步的,所述锁紧螺母与工件之间还设有开口垫圈
本发明提供了基于工业机器人的复杂曲面电解加工工具及方法,具有以下有益效果:
1、能够实现航空发动机整体叶轮等复杂曲面工件的电解加工成形,相较于传统的机械加工,具有无宏观切削力,能够加工高硬度的难切削材料、工具阴极无损耗的优势,可以很好地填补传统机械加工在这些方面的不足;
2、工具阴极结构简单,设计及制造简单,对称开孔设计能够很好的平衡电解液喷射的反力,克服工业机器人承载能力弱的弊端;同时,工具阴极上部做绝缘处理,避免非加工区的电化学溶解,减少杂散腐蚀,提高定域性,因而有利于提高加工精度和表面质量;
3、绝缘、密封性能良好,机器人本体与连接法兰之间采用绝缘螺钉与绝缘垫绝缘,柔性防护罩配合风琴罩进行随动密封,可靠实现机器人主体的绝缘与密封;加工工作箱底部呈斜面,能够让电解液快速经斜面低处的排液孔回流至回收装置;工作箱底部设有回形翻边,防止电解液进入回转工作台回转部分,有效实现密封;工作转台与支撑座之间设有绝缘套绝缘,并采用绝缘螺钉连接,实现回转主轴的完全绝缘设置。
4、通过阴极夹具安装结构简单的工具阴极,使得工具阴极在工业机器人的驱动下精确实现任意形式的复合进给运动,极大程度的提高工具阴极的可达性,具备良好的加工柔性和适应性,完成复杂曲面工件的电解加工成形。
附图说明
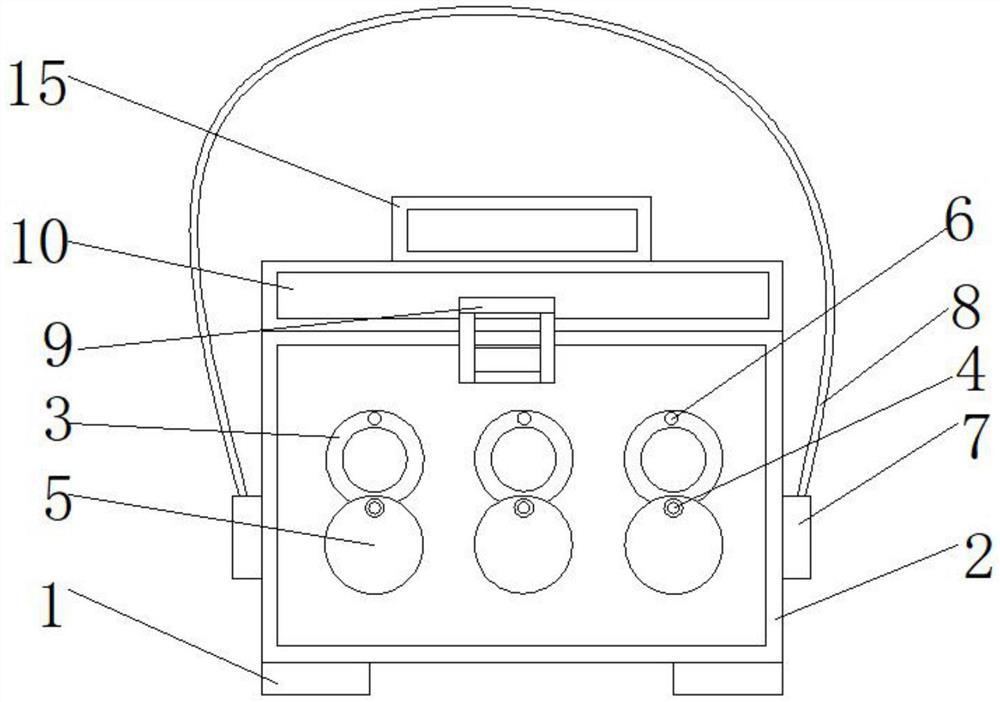
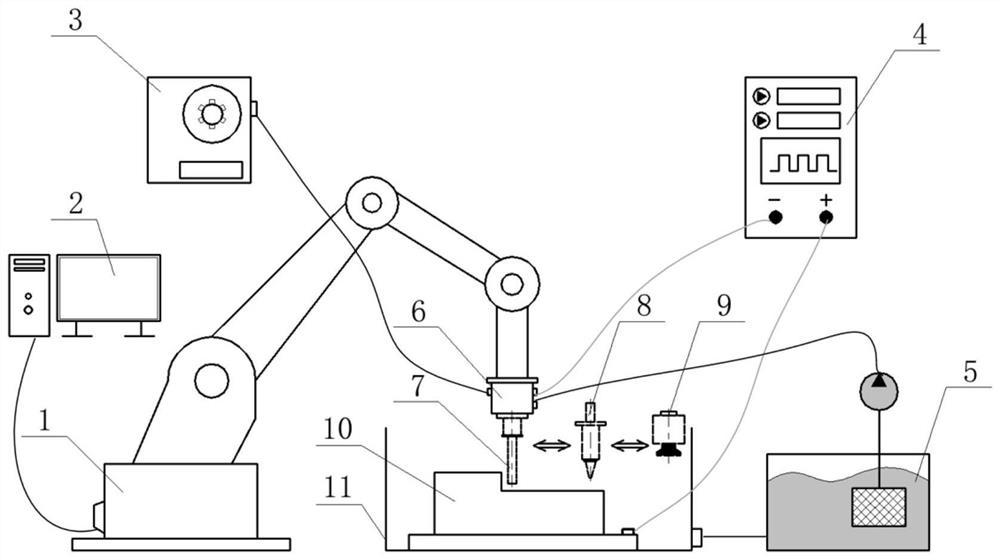
图1为本发明的局部剖视结构示意图;
图2为本发明工具阴极正面的结构示意图;
图3为本发明工具阴极背面的结构示意图;
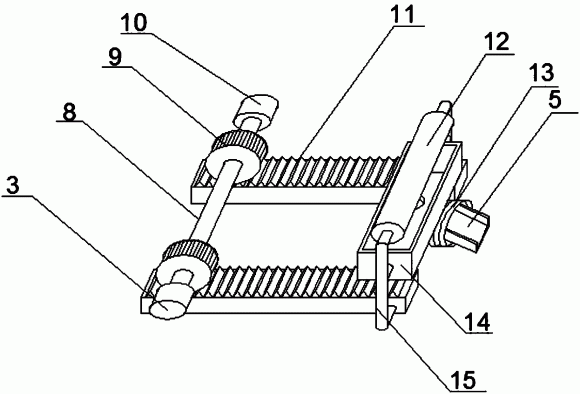
图4为本发明阴极夹具的结构示意图;
图5为本发明阴极夹具的剖视结构示意图;
图6为本发明工作箱和回转工作台的结构示意图;
图7为本发明阳极定位夹紧装置的结构示意图。
图中:
1、工业机器人,11、法兰,12、绝缘垫,13、法兰绝缘螺钉;2、阴极夹具,21、夹具体,22、导电铜套,23、管接头,24、密封圈,25、电源接头;3、工具阴极,31、轴向定位凸台,32、孔型电解液出口,33、电解液入口;4、阳极定位夹紧装置,41、长心轴,42、圆柱销,43、对刀块,44、锁紧螺母;5、工作箱,51、倾斜面,52、排液孔,55、柔性防护罩;6、回转工作台,61、工作转台,62、绝缘套,63、支撑座,64、回转主轴,65、工作台绝缘螺钉,66、紧定螺钉;7、工件。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1~图7所示,其结构关系为:工业机器人1为六自由度机器人,能够带动工具阴极3做六自由度的复合运动;还包括与工业机器人1的执行端连接固定的阴极夹具2、连接于阴极夹具2前端的工具阴极3、工作箱5、设于工作箱5内底部的回转工作台6及设于回转工作台6顶部的阳极定位夹紧装置4;阴极夹具2整体呈正交连通为T型的管状结构,其竖直部分末端设管接头23,水平部分后端封闭且与工业机器人1连接固定,导电铜套22螺纹配合于水平部分前端内部,并通过密封圈24与水平部分密封连接,其与管接头23相同一侧设电源接头25;电解液进液管道和电缆密封穿过工作箱5侧壁顶部设置,电解液进液管道通过管接头23与夹具体21连通,电缆通过电源接头25将电源负极与导电铜套22连通;
工具阴极3呈底壁为水平面、顶壁断面呈U型的管状结构,其前端开口为电解液入口33并设向外凸出的轴向定位凸台31,后端封闭,底壁绝缘处理,后部顶壁和底壁对称设各孔型电解液出口32,工具阴极3轴向贯穿导电铜套22设置,其前部配合于导电铜套22内,轴向定位凸台31贴合导电铜套22端面设置;导电铜套22侧壁垂直于阴极工具3轴线配合连接阴极紧定螺钉34,阴极紧定螺钉34末端与阴极工具3的底壁抵接,以实现阴极工具3的限位固定;水平部分、导电铜套22和工具阴极3同轴设置;
工作箱5呈箱状结构,其侧壁设导电铜排并对应工业机器人1执行端的位置开设安装孔,侧壁底部设排液孔52,工业机器人1位于工作箱5外部,工具阴极3位于工作箱5内部;回转工作台6设于工作箱5内底部,并与工作箱5内底部区域隔离设置,其上设置阳极定位夹紧装置4,工件7通过阳极定位夹紧装置4固定于回转工作台6上,回转工作台6位于阴极工具3下方。
优选的,阳极定位夹紧装置4由导电材料制成,长心轴41直立固连于底板上,对刀块43设于底板上表面边沿,圆柱销42设于底板上,位于长心轴41和对刀块43之间,端面定位板套接于长心轴41上,与长心轴41固连,位于圆柱销42上方,锁紧螺母44螺纹配合连接于长心轴41上构成阳极定位夹紧装置4,底板通过各T型螺栓安装固定于回转工作台6顶部;工件7套接安装于长心轴41上,其底面与端面定位板贴合,圆柱销42顶端伸入所述端面定位板底部设置的底面孔内。
优选的,工作箱5中部设有直立的分隔壁,分隔壁于工作箱5内中部隔离出与工作箱5内底部区域不连通的分隔区,回转工作台6设于分隔区内;分隔壁顶部设水平向外翻折的翻边,翻边用于防止电解液进入回转工作台6的回转部分。
优选的,驱动电机的输出端通过传动机构连接回转主轴64,回转主轴64的轴线竖直设置,支撑座63通过紧定螺钉66连接固定于回转主轴64顶部,工作转台61通过各工作台绝缘螺钉65连接固定于支撑座63顶部,工作转台61和支撑座63之间设有绝缘套62,绝缘套62中部呈板状结构,边沿于翻边外侧竖直向下翻折,构成回转工作台6。
优选的,工作箱5底面为由远离排液孔52向靠近排液孔52方向由高至低的倾斜面51,倾斜面51的倾斜角度为10°。
优选的,阴极夹具2后端连接法兰11,法兰11与工业机器人1的执行端之间设绝缘垫12,并通过各法兰绝缘螺钉13连接。
优选的,安装孔处还设有风琴罩,风琴罩中部设柔性防护罩55,柔性防护罩55通过喉箍与法兰11连接,柔性防护罩55和风琴罩起随动密封作用,风琴罩和柔性防护罩55将工业机器人1与工作箱5内区域隔离,防止电解液溅射至工业机器人1上。
优选的,夹具体21和管接头23由耐腐蚀绝缘材料制成。
优选的,锁紧螺母44与工件7之间还设有开口垫圈。
具体使用时,包括以下步骤:
步骤一,将工具阴极3安装至导电铜套22内,然后将导电铜套22与夹具体21螺纹连接,并以密封圈24密封,再通过法兰11将夹具体21安装至工业机器人1执行端,安装时应当使工具阴极3的底壁朝下、顶壁朝上;将电解加工电源负极通过电缆和电源接头25与导电铜套22接通,并将电解液管道与管接头23连通;
步骤二,将工件7安装于长心轴41上,并通过锁紧螺母44和开口垫圈锁紧固定,然后将电解加工电源正极通过电缆与T型螺栓连接,以将电源正极与工件7接通;
步骤三,通过工作转台61将工件精确分度,再手动控制工业机器人,以对刀块43为基准调整工具阴极3的位置,并将对刀完成后的位置设定为基准位置;然后工具阴极3在工业机器人1的带动下进给至初始加工位置;
步骤四,加注电解液,并接通电解加工电源,工业机器人1带动工具阴极3六自由度复合进给运动,进行单个分度的复杂曲面加工;
步骤五,单个分度的复杂曲面加工结束后,断开电解加工电源并停止供给电解液,所述工业机器人(1)带动所述工具阴极(3)退回初始位置,工作转台(61)带动工件再次分度,重复步骤四,进行下一个分度的复杂曲面加工,直至所有分度的复杂曲面均加工完成。
加工过程中,电解液由电解液进液管道进入夹具体21内腔,由电解液入口33流入工具阴极3,再经各孔型电解液出口32流入加工间隙后落入工作箱5的底部区域内,最后通过排液孔52流出,带走电解产物和反应热。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
基于工业机器人的复杂曲面电解加工工具及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0