

IPC分类号 : B25J9/16,B25J18/00,B25J19/04,B63B23/00






专利摘要
本发明设计一种主动控制恒张力的三连杆式船用自抓放机械臂装置。装置主要包括底座、平衡平台、左平衡臂、右平衡臂、张力传感器、连杆一、连杆二、连杆三、左辅助平衡臂、右辅助平衡臂、主吊索、左平衡索、右平衡索、左辅助平衡索、右辅助平衡索、视觉传感器、吊环、抓钩、PLC控制箱。采用四条平衡索,利用PLC实现主动控制恒张力,并采用视觉传感器的抓钩实现自动抓取收放功能。本发明优点在于使用多个自由度的三连杆式机械臂,扩大抓取范围。同时考虑海洋环境因素干扰力对主吊索、抓钩和被吊物影响。采用四条平衡索,提升减摇效果。运用视觉传感器,船用机械臂可以自动抓取收放被吊物,且相比于人工操作的船用起重机更加智能化,适用于多种运载器。
权利要求
1.一种主动控制恒张力的三连杆式船用自抓放机械臂装置,包括底座、平衡平台、左平衡臂、右平衡臂、张力传感器、连杆一、连杆二、连杆三、左辅助平衡臂、右辅助平衡臂、主吊索、左平衡索、右平衡索、左辅助平衡索、右辅助平衡索、视觉传感器、吊环、抓钩、PLC控制箱,左平衡臂和右平衡臂分别用左平衡索和右平衡索与抓钩上的吊环相连,左辅助平衡臂和右辅助平衡臂分别用左辅助平衡索和右辅助平衡索与抓钩上的吊环相连,一种主动控制恒张力的三连杆式船用自抓放机械臂装置,其特征是:
(1)一种主动控制恒张力的三连杆式船用自抓放机械臂装置,所选用的三连杆式机械臂具有多个自由度,相比于人工操作的船用起重机,可以自动抓取收放底座附近的鱼雷、潜航器、小艇,抓取收放范围比人工操作的船用起重机更大且不需要人工二次搬运;
(2)平衡平台上左右完全对称的位置放置左平衡臂和右平衡臂、两个张力传感器,连杆三上左右完全对称的位置放置左辅助平衡臂和右辅助平衡臂,连杆三另外安装三个张力传感器,左平衡臂、右平衡臂、左辅助平衡臂、右辅助平衡臂分别用左平衡索、右平衡索、左辅助平衡索、右辅助平衡索与抓钩两侧的吊环相连,左平衡臂、右平衡臂、左辅助平衡臂、右辅助平衡臂通过左平衡索、右平衡索、左辅助平衡索、右辅助平衡索提供四个方向的张力,目的是为了提供与海风、海浪相平衡的力,使抓钩达到静平衡状态,进而使得抓钩在空间内任意方向的运动都受到阻碍,从而达到减摇功能;
当左、右平衡索未失效,仍能为抓钩和被吊物提供张力时,此时抓钩和被吊物受到海风、海浪对抓钩和被吊物的干扰力向运载器外部的海面一侧运动时,抓钩和被吊物的静平衡状态方程为:
式中:G
当左、右平衡索失效,不能为抓钩和被吊物提供张力时,即|F
(3)起吊开始时主吊索的张力传感器采集到的主吊索所受张力,将信号传给PLC控制箱内的PLC控制器,PLC控制器接收到信号开始执行主动控制恒张力模式,左平衡臂、右平衡臂、左辅助平衡臂、右辅助平衡臂都装有张力传感器可实时采集张力数值,将采集到张力值与实际张力值进行比较,得到张力偏差信号,将张力偏差信号传给PLC控制器,由PLC控制器控制左右位置对称的左平衡臂和右平衡臂、左辅助平衡臂和右辅助平衡臂的张开角度,进而改变通过左平衡索、右平衡索、左辅助平衡索、右辅助平衡索所产生的张力的大小,使抓钩在起吊过程中始终保持恒张力状态,进而使得抓钩在空间内任意方向的运动都受到阻碍,从而达到减摇功能;
(4)视觉传感器开始采集目标信息,并判断起吊的物体是否为被吊物,如果判断起吊的物体是被吊物,则将被吊物的位置信息一并传给PLC控制箱内的PLC控制器,PLC控制器将开始进行视觉自动抓取收放模式,此时PLC控制器控制连杆一转动,连杆一的转动进而连杆二开始传动,连杆二的传动进而使连杆三传动到被吊物所在位置,PLC控制器控制抓钩放下,抓住被吊物,完成自动抓取收放工作,而且视觉传感器随着抓钩一起运动,视角范围一直都会在抓钩的周围,不会存在视觉盲区,相比于人工操作船用起重机的吊钩,采用装有视觉传感器的抓钩可以实现自动抓取收放鱼雷、潜航器、小艇。
说明书
(一)技术领域
本发明属于船用机械臂抓取收放鱼雷、潜航器、小艇等一些物件的装置,特别是一种适用于复杂海洋干扰环境的主动控制恒张力的三连杆式船用自抓放机械臂装置。
(二)背景技术
随着国家海洋交通行业的大力发展,船用机械臂作为一种新型的海洋工程装备被广泛应用于该行业中。如今,船用机械臂越来越多用于鱼雷、潜航器、小艇等一些物件吊运工作,且适用范围广,有较好的发展前景。但是由于船用机械臂在真实海洋环境下进行起重作业时会受到海洋复杂多变的外界环境因素影响,使其在吊运作业过程中吊索会不断摇摆,进而影响船用机械臂的作业效率和安全性。因此如何实现船用机械臂的主动控制恒张力和自动抓取收放问题成为亟待解决的难点。
论文《船用起重机减摇控制系统设计与实验研究》给出一种人工操作的船用起重机减摇装置方案,设计了带折叠减摇臂式船用减摇起重机装置。利用外加的机械结构实现人工操作的船用起重机减摇的目的。但存在以下问题:
(1)提出的装置设计方案只适用于人工操作的船用起重机。首先人工操作的船用起重机不能自动抓取收放鱼雷、潜航器、小艇等一些物件。其次在吊运开始时需要人工固定吊钩与吊索,起吊过程中吊钩松脱,导致物件坠落,造成生产安全和生命安全事故。不能实现装置智能化的自动抓取收放货物功能,影响起重作业效率。
(2)论文在对人工操作的船用起重机的受力分析问题上没有考虑海风等外界环境因素对抓钩和被吊物的干扰力,不符合实际情况。
(3)提出的装置方案运用了三条减摇臂,虽然可以达到减摇的目的,但是不能应对复杂海洋环境对抓钩和被吊物产生多个方向的干扰力,不能确保抓钩及被吊物在吊运过程中具有更好的稳定性。
(4)提出的装置方案适用于人工操作的船用起重机,不能吊运人工操作的船用起重机底座附近的货物,必须利用人工二次搬运到指定位置或者需要人工调换吊钩位置来吊运扩大范围。效率不高,浪费宝贵的甲板空间资源。
此外论文《船用起重机三索限位式防摇摆装置设计》、专利《船用起重机内嵌式滚珠吊盘减摇装置》、专利《一种船用起重机折叠减摇臂式减摇装置》提出的装置方案虽然也能达到减摇的目的,但是本质上都属于人工操作的船用起重机,自由度小于船用机械臂,因而抓取范围没有船用机械臂的范围大,并且主动控制恒张力和自动抓取收放等智能化功能仍未实现。
(三)发明内容
本发明目的在于提供一种可主动控制恒张力,可自动抓取收放鱼雷、潜航器、小艇等一些物件,解决由于海面复杂环境对主吊索产生的摇摆使得船用机械臂工作效率下降和无法安全工作的问题,可安装在多种运载器的主动控制恒张力的三连杆式船用自抓放机械臂装置。
本发明所设计的一种主动控制恒张力的三连杆式船用自抓放机械臂装置,主要包括底座、平衡平台、左平衡臂、右平衡臂、张力传感器、连杆一、连杆二、连杆三、左辅助平衡臂、右辅助平衡臂、主吊索、导线轮、左平衡索、右平衡索、左辅助平衡索、右辅助平衡索、固定件、轴承、视觉传感器、吊环、抓钩、PLC控制箱。左平衡臂和右平衡臂分别用左平衡索和右平衡索与抓钩上的吊环相连。左辅助平衡臂和右辅助平衡臂分别用左辅助平衡索和右辅助平衡索与抓钩上的吊环相连。本发明还包括这样的特征:
(1)本发明所设计的一种主动控制恒张力的三连杆式船用自抓放机械臂装置,相比于人工操作的船用起重机,本发明所选用的三连杆式机械臂具有多个自由度,可以抓取收放底座附近的鱼雷、潜航器、小艇等一些物件。抓取收放范围比人工操作的船用起重机更大且不需要人工二次搬运,极大提高工作效率和甲板空间的利用率。
(2)起吊过程开始时主吊索的张力传感器采集到的主吊索所受张力,将信号传给PLC控制箱内的PLC控制器,PLC控制器接收到信号开始执行主动控制恒张力模式。其过程如下:左平衡臂、右平衡臂、左辅助平衡臂、右辅助平衡臂都装有张力传感器可实时采集张力数值,将采集到张力值与实际张力值进行比较,得到张力偏差信号,将张力偏差信号传给PLC控制器。由PLC控制器控制左右位置完全对称的左平衡臂、右平衡臂、左辅助平衡臂、右辅助平衡臂的张开角度,进而改变通过左平衡索、右平衡索、左辅助平衡索、右辅助平衡索所产生的张力的大小,使抓钩在起吊过程中始终保持恒张力状态。实现主动控制恒张力的功能,进而达到减摇功能。
(3)抓钩上安装的视觉传感器可以采集被吊物的位置信息,可根据采集到的被吊物位置信息通过PLC控制箱内的PLC控制器,PLC控制器控制连杆一转动,然后控制连杆二和连杆三的传动,移动到被吊物位置。此时主吊索放下抓钩,实现自动抓取功能。并且在常规抓钩的基础上加装视觉传感器。抓钩的前端安装视觉传感器作为视觉信息采集装置,而且视觉传感器随着抓钩一起运动,视角范围一直都会在抓钩的周围,不会存在视觉盲区。
(4)相比于人工操作的船用起重机的吊钩,采用装有视觉传感器的抓钩可以实现自动抓取收放鱼雷、潜航器、小艇等一些物件的功能。而且人工操作的船用起重机吊钩与吊索在起重作业时可能会松脱,导致物件坠落,造成生产安全和生命安全事故。但是装有视觉传感器的抓钩不会出现上述状况,相比于人工操作的船用起重机无需人工固定吊钩与吊索,更加安全和智能化,可以实现自动抓取收放功能。
本发明具有如下有益效果:
(1)本发明适用于工作在复杂海面环境下的运载器。相比于人工操作的船用起重机,首先本发明装有采用视觉传感器的抓钩,相比于人工操作的船用起重机的吊钩,采用装有视觉传感器的抓钩可以实现自动抓取收放鱼雷、潜航器、小艇等一些物件的功能。其次人工操作的船用起重机吊钩与吊索在起重作业时可能会松脱,导致物件坠落,造成生产安全和生命安全事故。但是装有视觉传感器的抓钩不会出现上述状况,相比于人工操作的船用起重机无需人工固定吊钩与吊索,更加安全和智能化,可以实现自动抓取收放功能。
(2)本发明在受力分析时考虑了海风等外界环境因素对抓钩和被吊物的干扰力,因此本发明装置方案更符合实际应用情况。
(3)本发明选用四条减摇臂和四条平衡索既实现了主动控制恒张力功能,又可以应对复杂海洋环境对抓钩和被吊物产生多个方向的干扰力,确保抓钩及被吊物在吊运过程中具有更好的稳定性,提升减摇效果。
(4)本发明选用三连杆式机械臂,具有多个自由度。可以抓取收放底座附近的鱼雷、潜航器、小艇等一些物件。抓取收放范围比人工操作的船用起重机更大且不需要人工二次搬运到指定位置,极大提高工作效率和甲板空间的利用率。
因此,该发明适用于工作在复杂海面环境下运载器,并且能更加安全和智能化执行抓取收放鱼雷、潜航器、小艇等一些物件的工作,提高工作效率和甲板空间的利用率。
(四)附图说明
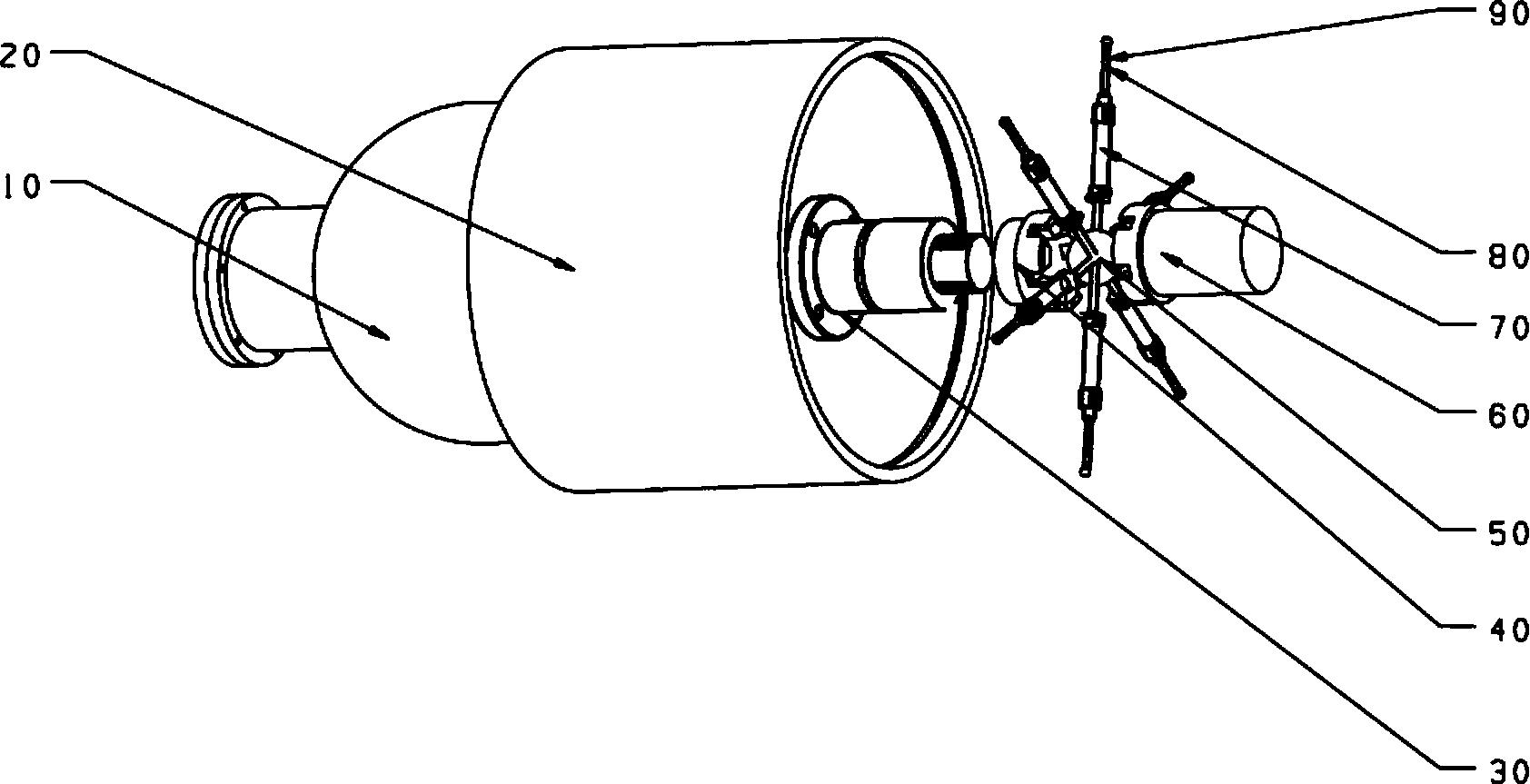
图1为装置结构示意图;
图2为左、右平衡索未失效时受力示意图;
图3为左、右平衡索失效时受力示意图;
图4为主动控制恒张力流程图;
图5为视觉自动抓取收放流程图。
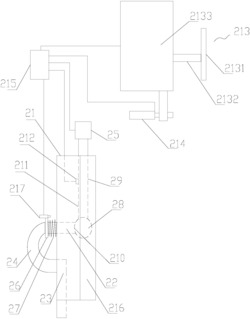
附图标记:1-底座,2-平衡平台,3-左平衡臂,4-右平衡臂,5-张力传感器,6-连杆一,7-连杆二,8-连杆三,9-左辅助平衡臂,10-右辅助平衡臂,11-主吊索、12-导线轮,13-左平衡索,14-右平衡索,15-左辅助平衡索,16-右辅助平衡索,17-固定件,18-轴承,19-视觉传感器,20-吊环,21-抓钩,22-PLC控制箱。
(五)具体实施方式
下面结合附图对本发明进行详细描述:
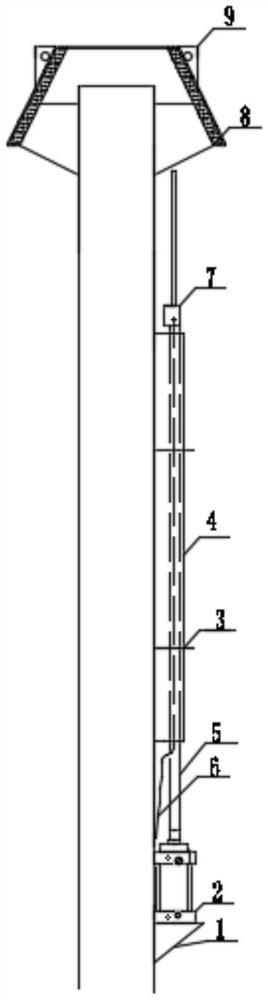
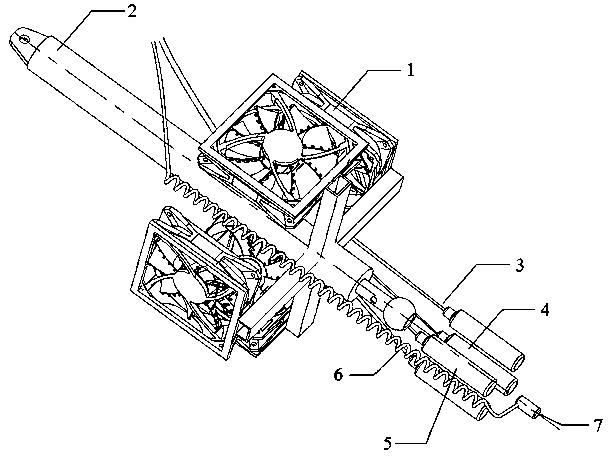
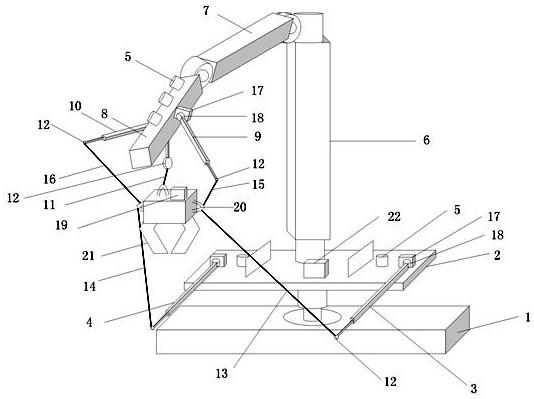
如图1所示,一种主动控制恒张力的三连杆式船用自抓放机械臂装置,主要包括底座1、平衡平台2、左平衡臂3、右平衡臂4、张力传感器5、连杆一6、连杆二7、连杆三8、左辅助平衡臂9、右辅助平衡臂10、主吊索11、导线轮12、左平衡索13、右平衡索14、左辅助平衡索15、右辅助平衡索16、固定件17、轴承18、视觉传感器19、吊环20、抓钩21、PLC控制箱22。左平衡臂3和右平衡臂4分别用左平衡索13和右平衡索14与抓钩21上的吊环20相连。左辅助平衡臂9和右辅助平衡臂10分别用左辅助平衡索15和右辅助平衡索16与抓钩21上的吊环20相连。PLC控制箱22为密封的钢制箱体,防止海水侵蚀内部,其内部为PLC控制器。
本发明在常规三连杆式机械臂的结构基础上,在连杆一6末端添加平衡平台2,平衡平台2上安装两个张力传感器5。并且平衡平台2上左右完全对称的位置放置左平衡臂3和右平衡臂4。所设计的左平衡臂3末端和右平衡臂4末端通过轴承18与平衡平台2连接,并用固定件17加固在平衡平台2上。所设计的左平衡臂3的前端加装导线轮12。右平衡臂4与左平衡臂3同理。连杆三8的末端加装导线轮12和3个张力传感器5。导线轮12和抓钩21上方的吊环20通过主吊索11连接。并且连杆三8上左右完全对称的位置放置左辅助平衡臂9和右辅助平衡臂10。所设计的左辅助平衡臂9末端和右辅助平衡臂10末端通过轴承18与连杆三8连接,并用固定件17加固在连杆三8上。所设计的左辅助平衡臂9的前端加装导线轮12。右辅助平衡臂10与左辅助平衡臂9同理。左平衡臂3和右平衡臂4分别用左平衡索13和右平衡索14与抓钩21两侧的吊环20相连。左辅助平衡臂9和右辅助平衡臂10分别用左辅助平衡索15和右辅助平衡索16与抓钩21上的吊环20相连。左右位置完全对称的左平衡臂3、右平衡臂4、左辅助平衡臂9、右辅助平衡臂10分别通过左平衡索13、右平衡索14、辅助平衡索15、右辅助平衡索16提供四个方向张力,目的是为了提供与海风等外界因素相平衡的力,使抓钩21达到静平衡状态,进而使得抓钩21在空间内任意方向的运动都受到阻碍,从而达到减摇功能。
本发明所设计的一种主动控制恒张力的三连杆式船用自抓放机械臂装置,相比于人工操作的船用起重机,本发明所选用的三连杆式机械臂具有多个自由度,可以抓取收放底座附近的鱼雷、潜航器、小艇等一些物件。抓取收放范围比人工操作的人工操作的船用起重机更大且不需要人工二次搬运,极大提高工作效率和甲板空间的利用率。
起吊过程开始时主吊索11的张力传感器5采集到的主吊索所受张力,将信号传给PLC控制箱22内的PLC控制器,PLC控制器接收到信号开始执行主动控制恒张力模式。其过程如下:左平衡臂3、右平衡臂4、左辅助平衡臂9、右辅助平衡臂10都装有张力传感器5可实时采集张力数值,将采集到张力值与实际张力值进行比较,得到张力偏差信号,将张力偏差信号传给PLC控制器。由PLC控制器控制左右位置完全对称的左平衡臂3、右平衡臂4和左辅助平衡臂9、右辅助平衡臂10的张开角度,进而改变通过左平衡索13、右平衡索14、辅助平衡索15、右辅助平衡索16所产生的张力的大小,使抓钩在起吊过程中始终保持恒张力状态。实现主动控制恒张力的功能,进而达到减摇功能。
抓钩上安装的视觉传感器19可以采集被吊物的位置信息,可根据采集到的被吊物位置信息通过PLC控制箱内的PLC控制器,PLC控制器控制连杆一6转动,然后控制连杆二7和连杆三8的传动,移动到被吊物位置。此时主吊索下放抓钩21,实现自动抓取收放功能。并且在常规抓钩的基础上加装视觉传感器19。抓钩21的前端安装视觉传感器19作为视觉信息采集装置,而且视觉传感器19随着抓钩21一起运动,视角范围一直都会在抓钩的周围,不会存在视觉盲区。
相比于人工操作的船用起重机的吊钩,采用装有视觉传感器的抓钩可以实现自动抓取收放鱼雷、潜航器、小艇等一些物件。而且人工操作的船用起重机吊钩在起重作业时可能会松脱,导致物件坠落,造成生产安全和生命安全事故。但是装有视觉传感器的抓钩不会出现上述状况,相比于人工操作的船用起重机无需人工固定吊钩与吊索,更加安全和智能化,可以实现自动抓取收放功能。
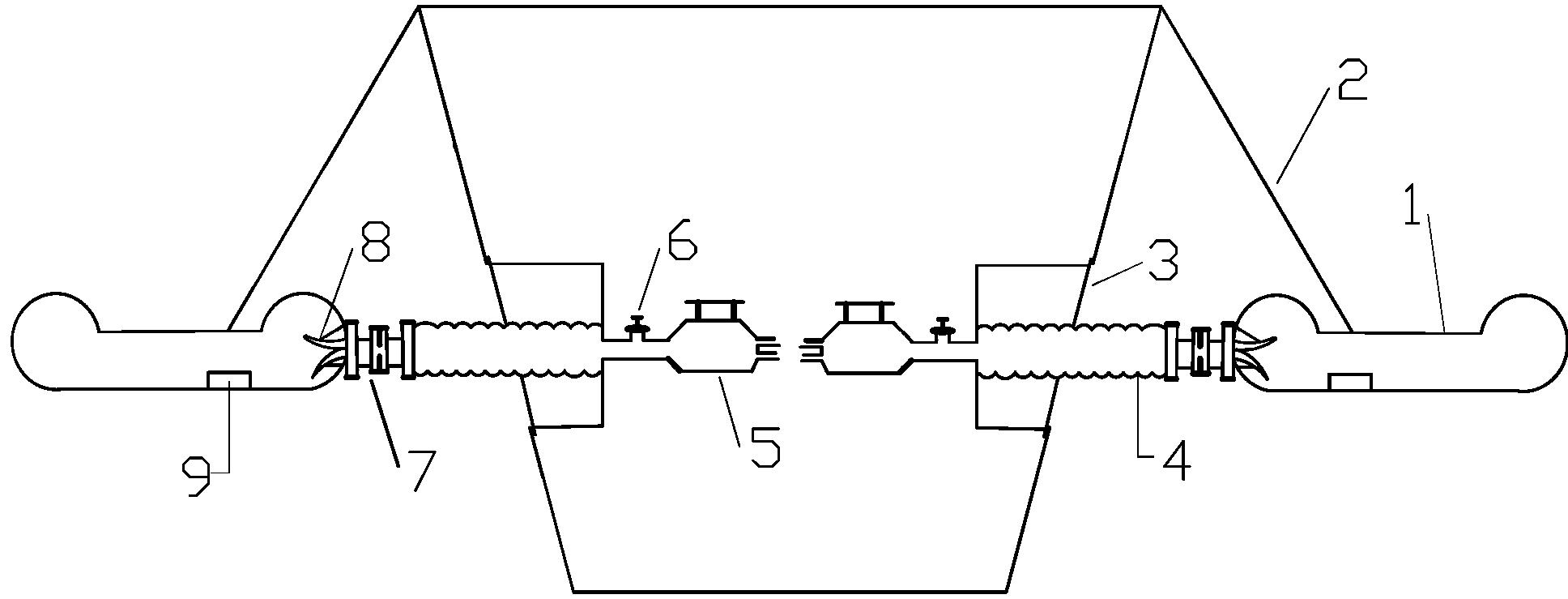
根据受力结构,一种主动控制恒张力的三连杆式船用自抓放机械臂装置在起吊过程中可简化为左、右平衡索未失效时受力示意图和左、右平衡索失效时受力示意图两种情况。M点为连杆三与主吊索的交点;L为左平衡臂与左平衡索的交点;R为右平衡臂与右平衡索的交点;B为左辅助平衡臂与左辅助平衡索的交点;C为右辅助平衡臂与右辅助平衡索的交点;A为抓钩。抓钩因自身及被吊物的重力、主吊索张力与左平衡索、右平衡索张力、左辅助平衡索张力、右辅助平衡索张力的共同作用而保持平衡。左平衡索、右平衡索、左辅助平衡索、右辅助平衡索提供四个方向张力,目的是为了提供与海风等外界因素相平衡的力,使抓钩达到静平衡状态,进而使得抓钩在空间内任意方向的运动都受到阻碍,从而达到减摇功能。
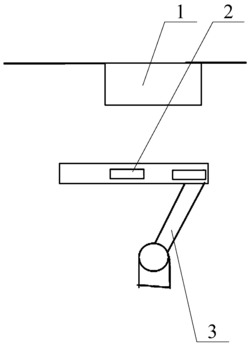
当左、右平衡索未失效,仍能为抓钩和被吊物提供张力时。抓钩及被吊物受力分析如图2左、右平衡索未失效时受力示意图所示,此时抓钩和被吊物受到海风等外界环境因素对抓钩和被吊物的干扰力向运载器外部的海面一侧运动时,抓钩和被吊物的静平衡状态方程为:
式中:GA为抓钩及被吊物自身的重力;FI为左平衡索的张力,FII为右平衡索的张力;FIII为左辅助平衡索的张力;FIV为右辅助平衡索的张力;Fm为主吊索的张力;Fr为海风等外界环境因素对抓钩和被吊物的干扰力。FI与x,y,z轴正方向的夹角分别为θ1x,θ1y,θ1z;FII与x,y,z轴正方向的夹角分别为θ2x,θ2y,θ2z;FIII与x,y,z轴正方向的夹角分别为θ3x,θ3y,θ3z;FIV与x,y,z轴正方向的夹角分别为θ4x,θ4y,θ4z;Fm与x,y,z轴正方向的夹角分别为 Fr与x,y,z轴正方向的夹角分别为αx,αy,αz。
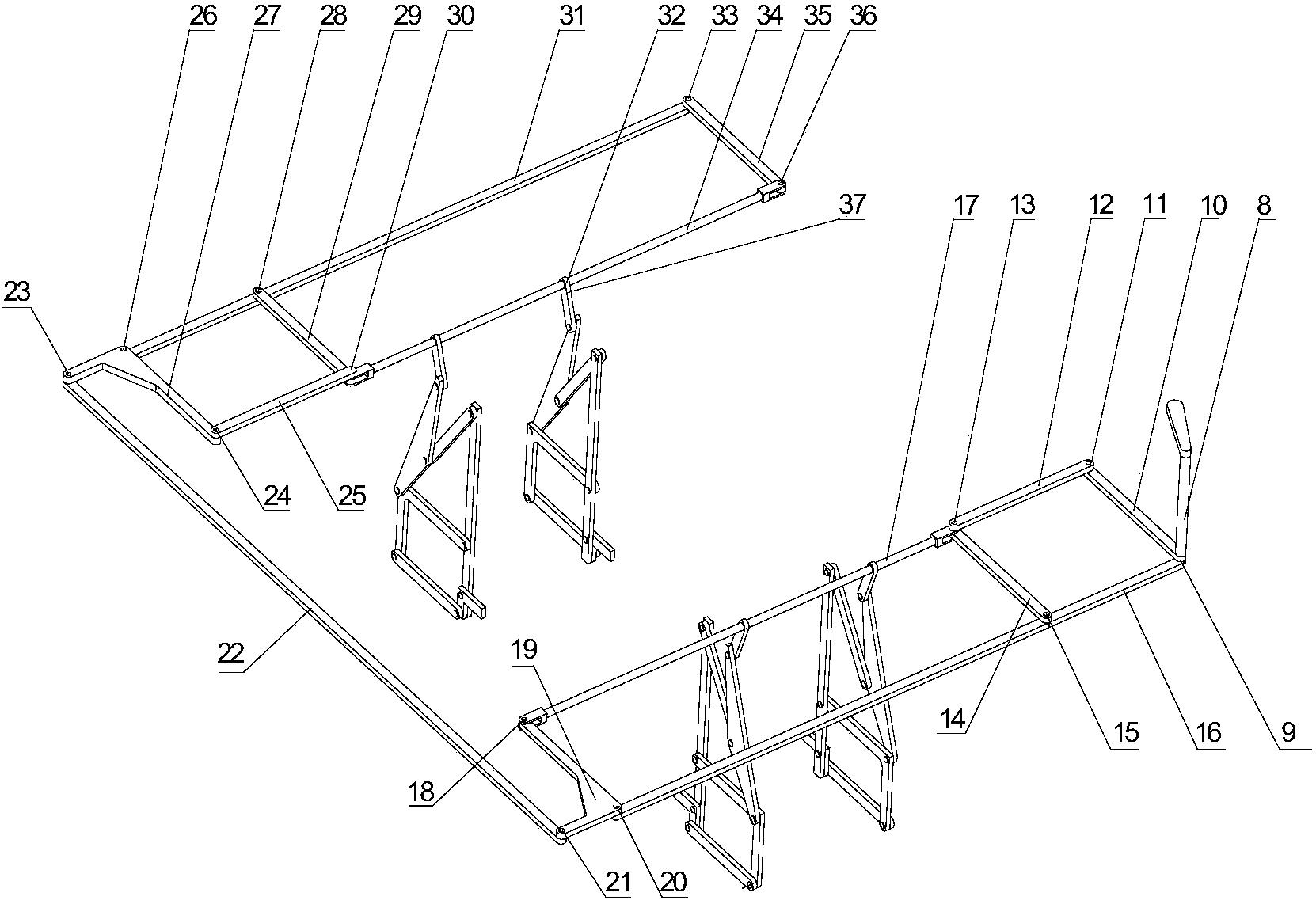
当左、右平衡索失效,不能为抓钩和被吊物提供张力时,即FI=FII=0。抓钩及被吊物受力分析如图3左、右平衡索失效时受力示意图所示,此时抓钩和被吊物受到海风等外界环境因素对抓钩和被吊物的干扰力向主动控制恒张力的三连杆式船用自抓放机械臂装置主体一侧运动时,抓钩和被吊物静平衡状态方程为:
本次发明的主动控制恒张力工作原理:
如图4主动控制恒张力流程图所示,起吊开始时主吊索的张力传感器采集到的主吊索所受张力,将信号传给PLC控制箱内的PLC控制器,PLC控制器接收到信号开始执行主动控制恒张力模式。左平衡臂、右平衡臂、左辅助平衡臂、右辅助平衡臂都装有张力传感器可实时采集张力数值,将采集到张力值与实际张力值进行比较,得到张力偏差信号,将张力偏差信号传给PLC控制器。由PLC控制器控制左右位置对称的左平衡臂和右平衡臂、左辅助平衡臂和右辅助平衡臂的张开角度,进而改变通过左平衡索、右平衡索、左辅助平衡索、右辅助平衡索所产生的张力的大小,使抓钩在起吊过程中始终保持恒张力状态。实现主动控制恒张力功能,进而使得抓钩在空间内任意方向的运动都受到阻碍,从而达到减摇功能。
本次发明的视觉自动抓取工作原理:
如图5视觉自动抓放流程图所示,视觉传感器开始采集目标信息,并判断起吊的物体是否为被吊物。如果判断起吊的物体是被吊物,则将被吊物的位置等信息一并传给PLC控制箱内的PLC控制器,PLC控制器将开始进行视觉自动抓取收放模式。此时PLC控制器控制连杆一转动,连杆一的转动进而连杆二开始传动,连杆二的传动进而使连杆三传动到被吊物所在位置。这样,PLC控制器控制抓钩放下,抓住被吊物,完成自动抓取收放工作。而且视觉传感器随着抓钩一起运动,视角范围一直都会在抓钩的周围,不会存在视觉盲区。相比于人工操作的船用起重机的吊钩,采用装有视觉传感器的抓钩可以实现自动抓取收放鱼雷、潜航器、小艇等一些物件。而且人工操作的船用起重机吊钩在起重作业时可能会松脱,导致物件坠落,造成生产安全和生命安全事故。但是装有视觉传感器的抓钩不会出现以上状况。相比于人工操作的船用起重机无需人工固定吊钩与吊索,本发明更加安全和智能化,可以实现自动抓取收放功能。
一种主动控制恒张力的三连杆式船用自抓放机械臂装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0