




专利摘要
本实用新型公开了一种基于UWB的室内定位导航巡检机器人系统,包括通过WIFI技术进行通讯的巡检机器人和上位机,其中:巡检机器人包括运动控制系统、环境检测系统和UWB定位系统,运动控制系统包括MCU主控模块、电机驱动模块、避障模块、循迹导航模块和第一WIFI模块,环境检测系统、UWB定位系统和运动控制系统中其他模块均与MCU主控模块连接;上位机包括第二WIFI模块、按键模块和显示屏,第二WIFI模块、按键模块和显示屏两两连接。本实用新型中不需要保持时间同步,同时将UWB定位和循迹导航相结合,既能够实现巡检机器人的定位、导航和信息采集功能,又具有结构简单、稳定性高、成本低、定位精度高的优点。
权利要求
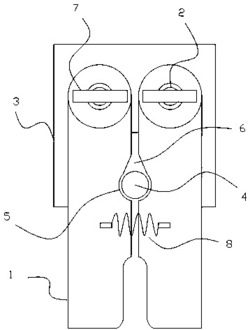
1.一种基于UWB的室内定位导航巡检机器人系统,其特征在于,包括通过WIFI技术进行通讯的巡检机器人(1)和上位机(2),其中:
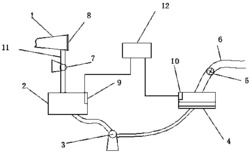
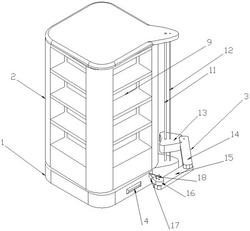
巡检机器人(1)包括运动控制系统(3)、环境检测系统(4)和UWB定位系统(5),运动控制系统(3)包括MCU主控模块(10)、电机驱动模块(11)、避障模块(12)、循迹导航模块(13)和第一WIFI模块(14),环境检测系统(4)、UWB定位系统(5)、避障模块(12)和循迹导航模块(13)的输出端分别连接MCU主控模块(10)的输入端,电机驱动模块(11)的输入端连接MCU主控模块(10)的输出端,第一WIFI模块(14)与MCU主控模块(10)双向连接;
上位机(2)包括第二WIFI模块(7)、按键模块(8)和显示屏(9),按键模块(8)的输出端分别连接第二WIFI模块(7)和显示屏(9)的输入端,显示屏(9)的输入端还连接第二WIFI模块(7)的输出端,上位机(2)通过第二WIFI模块(7)、第一WIFI模块(14)与巡检机器人(1)实现双向通讯连接。
2.根据权利要求1所述的一种基于UWB的室内定位导航巡检机器人系统,其特征在于,电机驱动模块(11)包括电机控制器(20)、左轮电机(21)和右轮电机(22),电机控制器(20)的输入端与MCU主控模块(10)的输出端连接,左轮电机(21)和右轮电机(22)的输入端分别与电机控制器(20)的输出端连接;
电机驱动模块(11)采用的型号为L298N。
3.根据权利要求1所述的一种基于UWB的室内定位导航巡检机器人系统,其特征在于,避障模块(12)包括超声波测距模块(23),超声波测距模块(23)的输出端与MCU主控模块(10)的输入端连接;
超声波测距模块(23)采用的型号为HC-SR04。
4.根据权利要求1所述的一种基于UWB的室内定位导航巡检机器人系统,其特征在于,循迹导航模块(13)包括安装在巡检机器人(1)底部的磁导航传感器(24)和铺设在地面上的磁条轨迹,磁导航传感器(24)的输出端与MCU主控模块(10)的输入端连接。
5.根据权利要求1所述的一种基于UWB的室内定位导航巡检机器人系统,其特征在于,环境检测系统(4)包括温湿度数据采集模块(15)、PM2.5浓度采集模块(16)和烟雾浓度采集模块(17),温湿度数据采集模块(15)、PM2.5浓度采集模块(16)和烟雾浓度采集模块(17)的输出端分别与MCU主控模块(10)的输入端连接;
温湿度数据采集模块(15)采用的传感器型号为数字温湿度传感器SHT20P,PM2.5浓度采集模块(16)采用的传感器型号为DSL-03激光数字式传感器,烟雾浓度采集模块(17)采用的传感器型号为MQ-2气体传感器。
6.根据权利要求1所述的一种基于UWB的室内定位导航巡检机器人系统,其特征在于,UWB定位系统(5)包括安装在室内固定位置的UWB基站(18)和安装在巡检机器人(1)外表面的UWB标签(19),UWB基站(18)和UWB标签(19)之间通过超宽带信号进行数据传输,UWB基站(18)与MCU主控模块(10)的输入端通过串口总线进行连接;
UWB基站(18)和UWB标签(19)均采用芯片DWM1000。
7.根据权利要求6所述的一种基于UWB的室内定位导航巡检机器人系统,其特征在于,UWB基站(18)至少有两个,且均设置在处于同一水平面上的室内墙壁上。
8.根据权利要求1所述的一种基于UWB的室内定位导航巡检机器人系统,其特征在于,巡检机器人(1)还包括报警模块(6),报警模块(6)中包括蜂鸣器和LED灯,报警模块(6)的输入端与MCU主控模块(10)的输出端连接。
9.根据权利要求1所述的一种基于UWB的室内定位导航巡检机器人系统,其特征在于,MCU主控模块(10)采用单片机,单片机型号为STM32F103。
一种基于UWB的室内定位导航巡检机器人系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0